


Dobar dan, ovaj put želim podijeliti upute o izradi modela teškog utovarivača iz Lega. Elektrifikacija kao i obično - Težak. model izrađena na temelju Lego 42079 HEAVY DUTY FORKLIFT. Mozak našeg modela bit će Arduino Nano v3, upravljanje putem Bluetooth-a. Za kontrolu možete koristiti Android telefon ili tablet ili drugu Arduino ploču s povezanim Bluetooth modulom.
Video domaćeg utovarivača:
Popis svega što vam treba je prilično dugačak:
- Lego Technic 42079 ili 42029
- Lego Technic 42033
- Arduino Nano v3 AT Mega 328
- L9110S pokretači motora 2 kom.
- Servo SG-90
- Bluetooth modul HC-06, HC-05 ili sličan
- Motor s mini prijenosnikom 50 o / min
- Mini motorni mjenjač 100 o / min
- Motorni mjenjač 6v 150 o / min
- Bijeli LED 2 kom.
- Otpornik 150 Ohm 2 kom.
- Kondenzator 10v 1000uF
- Jednoredni češalj PLS-40
- Induktor 68mkGn
- 4 NI-Mn 1.2v 1000mA baterije
- Priključak tata-mama dva pina na žicu
- Homutik
- Žice različitih boja
- lemljenje, kolofonija, lemljenje
- Baterija A23 ili A27
- Vijake 3x20, matice i podloške za njih
- Vijci 3x40
- Vijci 3x60
Korak 1 Sastavljamo slučaj.
Prvo trebate preuzeti upute Lego 42079 sa službene web stranice:
Otvorivši Lego upute, prikupljamo sve bodove od 1 do 40. Ne stavljajte samo zupčanike (oni će ometati), diferencijal, osovinu koljena. Zatim izvedite korake 56 do 75. To bi trebao biti osnova:
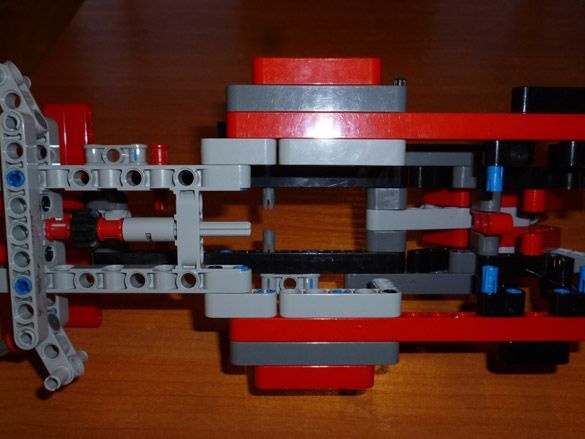
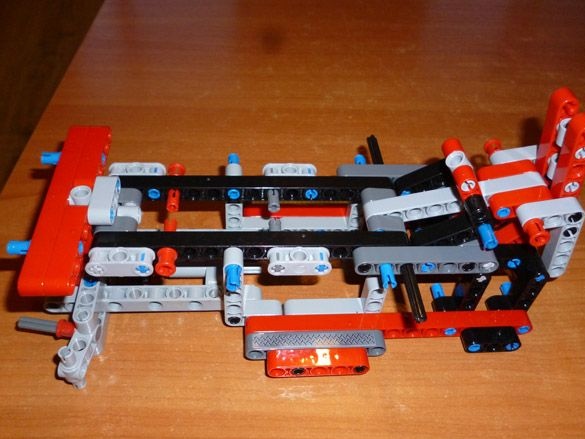
Zatim izvodimo korake od 95 do 15. Dobijamo sljedeće:
I pogled sprijeda:
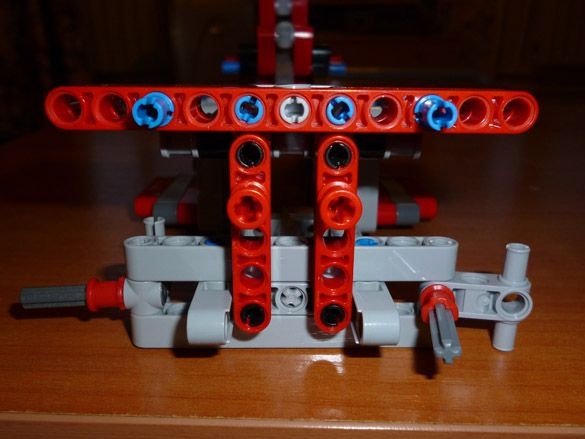
Mehanizam nagiba je malo izmijenjen kao na fotografiji:

Skupljamo vile, to su koraci 183 do 192. Dobivamo:
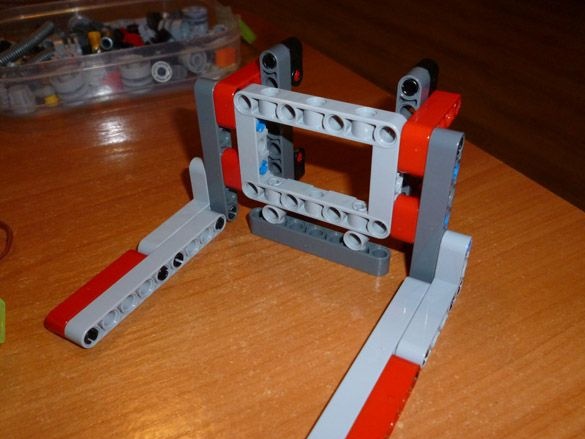
Dodajte detalje prema Lego uputama od 116 do 158:

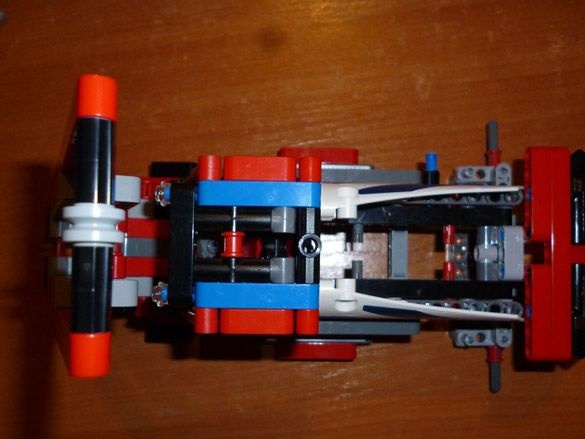
I ispod izgleda ovako:

Paketu također trebate prikupiti sa fotografije:

2. korak Dodajte motore.
Za provedbu pokreta vodeće osi uzimamo motor zupčanika sa brzinom vrtnje od 150 o / min i 6-voltni motor. Izlazne osovine mjenjača su dotjerane, što im daje oblik standardnog dijela Legovsky:

Kada izrađujete osovine u obliku križa, pokušajte staviti lego spojne rukave. Kad se priključni rukavi postave na dovoljnu dubinu, umetnite motor zupčanika u kućište, kao što je prikazano na fotografiji. I odmah stavite kotače:
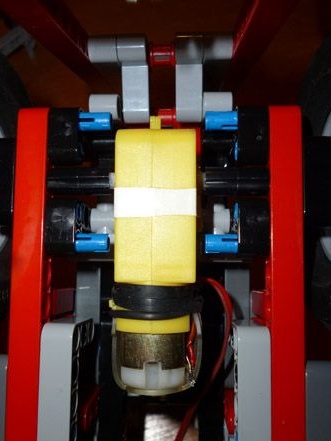
Sam motorni zupčanik pričvršćen je na tijelo pomoću vijaka 3x60.
Sada prelazimo na rotacijski mehanizam. Za njega nam treba servo SG-90. Bolje je odabrati s metalnim zupčanicima. Za početak trebamo odsjeći izbočene dijelove kućišta, dizajnirane za ugradnju servo-uređaja. A na dnu kućišta napravite i prolaznu rupu.Možete koristiti bušilicu od 3 mm ili je samo izrezati nožem, glavna stvar je da to učinite pažljivo kako ne biste oštetili unutrašnjost servo-a:

Da biste se povezali s dijelovima lego-a, uzmite najmanju polugu s servo-uređaja i privijte mali dio lega na njega. To bi trebalo izgledati ovako:

Rezultirajući dio stavljamo na servo:

Servu fiksiramo u donjem dijelu modela, otprilike u sredini. Za pričvršćivanje koristimo vijak 3x60. Zatim umetnemo osovinu i stavimo na nju zupčanik koji rotira kotače:
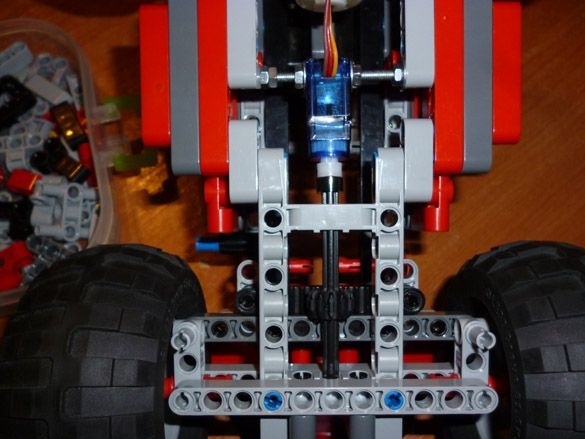
Stavili smo na sva četiri kotača:
Prelazimo na mehanizam za podizanje. Za to uzmemo mini zupčanik s brzinom od 50 okr / min. Izlazna osovina takvog motornog mjenjača je 3 mm, a dobro se slaže s Legovskyjevim spojnim rukavom. Za fiksaciju je potrebno samo umetnuti komad šibice. A također savijte dio s metalnog konstruktora, kao što je prikazano na slici, za pričvršćivanje motora na lego:

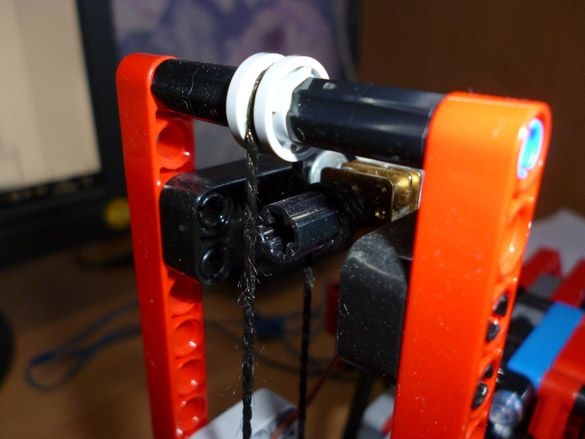
Sada mini motor zupčanika stavite u gornji dio mehanizma za podizanje, kao što je prikazano na fotografiji. Uzimamo debeli konac, provučemo ga kroz gornji valjak, a zatim ga namotamo na spojnu čahuru s motora (tri do četiri okreta) i provučemo ga kroz donji valjak. Trebao bi biti ovako:
Mi postavljamo vilice na naš dizajn, a krajeve konca pričvršćujemo vilicama:
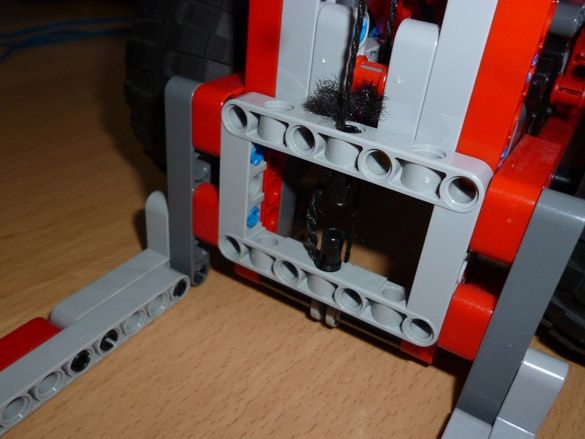
Cijeli sklop dizalica izgleda ovako:

A sada prijeđimo na mehanizam nagiba. Za njega uzimamo servo SG-90. Po mogućnosti s izgaranom elektronikom. Rastavljamo ga i vadimo upravljačku ploču, lemimo žice izravno na motor. Mi rastavimo dalje i izvadimo najveći stupanj prijenosa, odvojimo zaporne izbočine odozdo i stavimo ga na mjesto. Također je potrebno odrezati jezičke za ugradnju i napraviti rupe, kao u prvom servo pogonu. Pretvoreni servo pričvršćen je uz detalje legova:

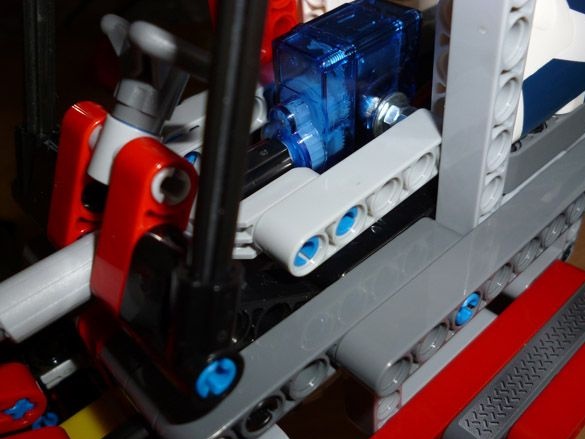
Mehanizam postavljamo unutar kabine:
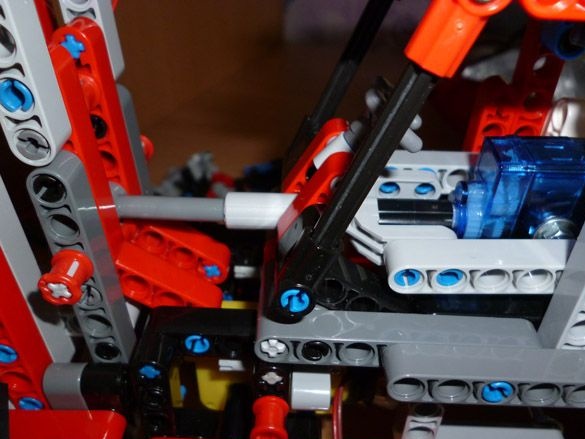
A njegov kraj je pričvršćen na mehanizam za podizanje:

Korak 3 priprema programskog okruženja.
Uređivanje i popunjavanje skica vrši se putem Arduino IDE-a. Ovaj program mora biti preuzet sa službena stranica i instalirati.
Zatim trebate dodati dvije knjižnice u programsko okruženje koje se koriste u skici. Servo.h je knjižnica za rad s servosima, a SoftwareSerial.h za stvaranje softverskog kanala za komunikaciju s Bluetooth modulom:
Preuzeti i nepakirani arhivi moraju se premjestiti u mapu "biblioteke" koja se nalazi u mapi s instaliranim Arduino IDE. Možete krenuti i drugim putem, a ne otpakirati arhive, dodati ih u programsko okruženje. Pokrenite Arduino IDE, odaberite Sketch - Connect Library s izbornika. Na samom vrhu padajućeg popisa odaberite stavku "Dodaj. Zip knjižnicu". Označavamo lokaciju preuzetih arhiva. Nakon svih koraka, trebate ponovo pokrenuti Arduino IDE.
Korak 4 Bluetooth modul.
Mi ćemo danas uzeti jedan od najpovoljnijih modula Bluetooth - HC-05 ili HC-06. Puna su u kineskim trgovinama i na ruskom tržištu. Oni nemaju toliko mnogo razlike: NS-05 može raditi i u načinu master (slave) i u slave mode (master). NS-06 je samo podređeni uređaj.
Ukratko karakteristike modula:
- Bluetooth čip - BC417143 proizvođača
- komunikacijski protokol - Bluetooth Specifikacija v2.0 + EDR;
- polumjer djelovanja - do 10 metara (razina snage 2);
- Kompatibilan sa svim Bluetooth adapterima koji podržavaju SPP;
- količina flash-memorije (za pohranu firmvera i postavki) - 8 Mbit;
- frekvencija radio signala - 2,40 .. 2,48 GHz;
- sučelje glavnog računala - USB 1.1 / 2.0 ili UART;
- potrošnja energije - struja tijekom komunikacije je 30-40 mA. Prosječna vrijednost struje je oko 25 mA. Nakon uspostavljanja veze, potrošena struja je 8 mA. Ne postoji način spavanja.
Za ispravan rad modula, morate ga konfigurirati prije povezivanja. Podešavanje se vrši tako da se AT naredbama unese u prozoru terminala. Prilagodit ćemo HC-05. Za ostale module naredbe mogu biti različite. Računalo i Bluetooth modul spojit ćemo kroz Arduino. U arduino unesite sljedeću skicu:
Ova je skica potrebna za slanje AT naredbi na Bluetooth modul. Arduino jednostavno sve što je napisano na terminalu prenosi u Bluetooth komunikacijski modul. Sada i u budućnosti modul ćemo povezati kroz knjižnicu SoftwareSerial. Veza za preuzimanje i upute za instalaciju bili su u prethodnom koraku.Pri velikim brzinama knjižnica je nestabilna. Ako naiđete na probleme s brzinom komunikacije, modul možete povezati izravno na Arduino RX i TX kontakte. Ne zaboravite ispraviti skicu u ovom slučaju. U ovom ćemo slučaju raditi s modulom brzinom od 9600. Dakle, nakon što ispunite skicu, otvorite prozor terminala i unesite sljedeće naredbe:
"AT" (bez navodnika) trebao bi stići odgovor "u redu" (znači da je sve ispravno povezano i modul radi)
„AT + BAUD96000“ (bez navodnika) trebao bi doći odgovor „OK9600“.
Ako imate pravi odgovor, prijeđite na sljedeći korak.
5. korak Upravljanje elektronika.
Za revitalizaciju našeg modela koristit ćemo Arduino Nano v3 i Bluetooth modul, kao i dva pokretača motora L9110S.
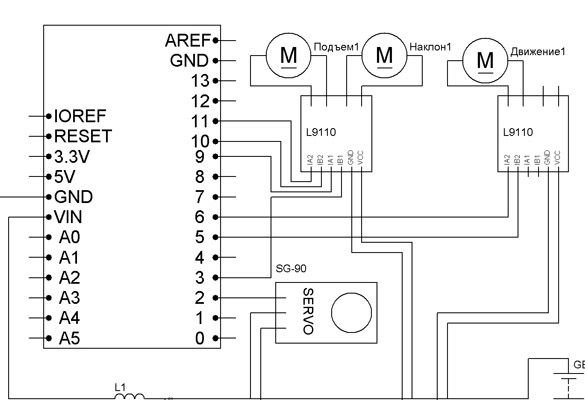
Za spajanje komponenata koristit ćemo žice s ženskim konektorima Dupont na krajevima. Za prehranu možete isprobati dvije mogućnosti. Prvo: 6 NI-Mn 1.2v 1000mA baterijama spojeno u seriju, a potom ih pokreću i Arduino i motori. Za Arduino u strujni krug mora biti uključen 10 V kondenzator većeg kapaciteta, kao i induktor. Ovo je potrebno za stabiliziranje snage mikrokontrolera. Za svjetiljke spojite anode dva LED-a na 4-polni Arduino, katode na GND. Za upotrijebljene LED diode treba odabrati otpornike. Druga opcija: odvojena hrana. Tada za motore koristimo sve iste baterije namotane električnom trakom:

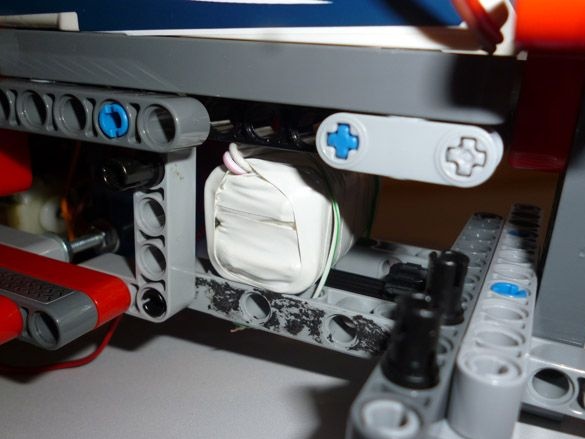
A za Arduino, baterija je A27 ili A23:

Za pouzdanost stavite bateriju u toplotno smanjenje.
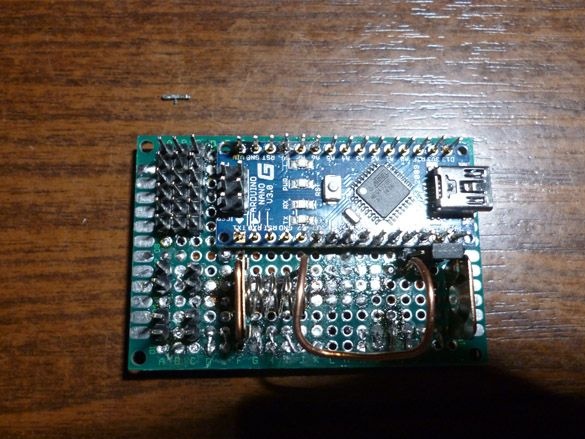
Naravno, sve možete povezati prema shemi jednostavno na "težini", ali bolje je to učiniti na pločici. Spajimo Arduino Nano odozgo, mjesto za bateriju i zaključke za napajanje ostalih elemenata:
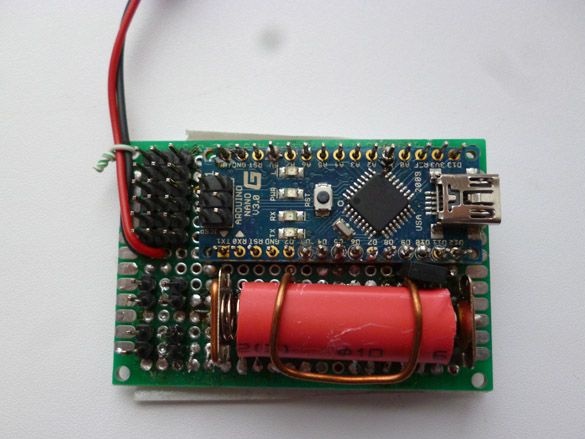
Bateriju smo postavili na predviđeno mjesto:
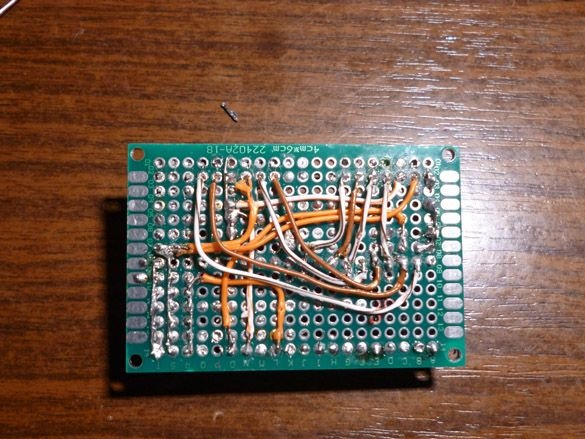
Odozdo možete lemiti sve staze, ali brže samo izolacijama:
Pričvršćujemo i lemimo kontakte vozača na dnu ove ploče:
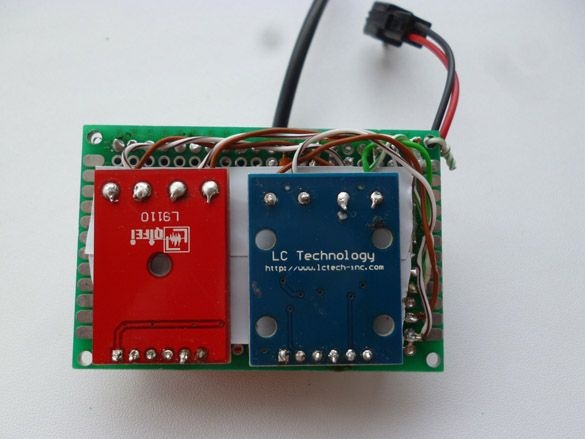
Ispada da su kompaktne i pouzdane žice.
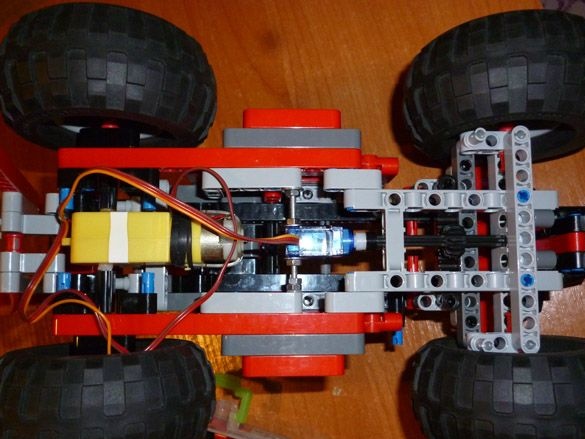
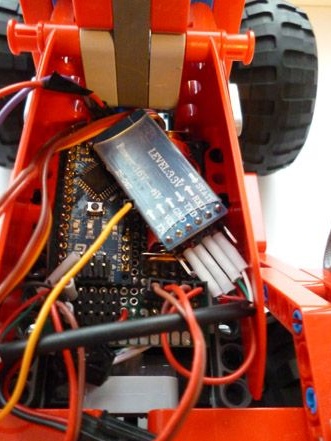
Svi su električni uređaji smješteni iza kabine:

Popravljamo baterije u nastavku:
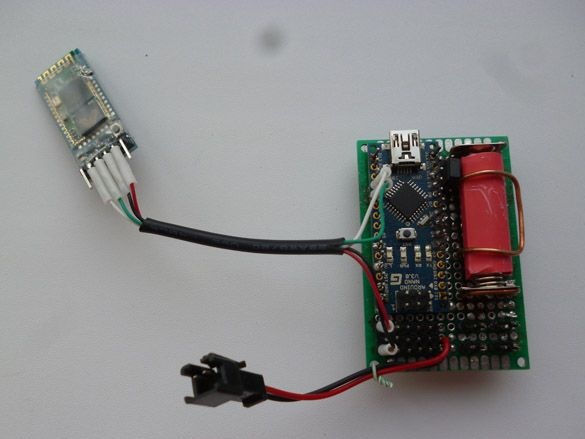
Bluetooth modul povezujemo na sljedeći način:
Arduino Nano - Bluetooth
D7 - RX
D8 - TX
5V - VCC
GND –GND
A ploču zajedno s modulom postavljamo na mjesto predviđeno za njih:
Korak 6 Postavljanje upravljačke ploče
Kao daljinski upravljač možete koristiti Android telefon ili tablet, računalo sa sustavom Windows ili ručno izrađeni daljinski upravljač na arduinu. Započnimo s verzijom na Androidu, za to ćete trebati instalirati upravljački program robota putem Bluetooth-a. U Google Play unesite "Bluetooth Arduino" i instalirajte željeni program. Preporučujem BT Controller. Tada kroz postavke Androida uspostavljamo vezu s Bluetooth modulom. Lozinka za vezu je "1234" ili "0000". Zatim konfigurirajte program za odgovarajuće naredbe. Popis je u nastavku.
Sljedeća opcija je Windows računalo. Možete koristiti prozor terminala za slanje naredbi ili korištenje prikladnog programa Z-Controller. Odaberite ulaz (com port kroz koji se uspostavlja) i konfigurirajte tipke za naredbe. Postavljanje je jednostavno i neće vam trebati puno vremena.
I na kraju, treća opcija, i po mom mišljenju najbolja, je upotreba fizičkog daljinskog upravljača, od tada osjetite klik gumba. Savjetujem vam da napravite daljinski upravljač, slijedeći moj instrukcije.
I dodajte tome Bluetooth modul.
Naredbe za upravljanje su sljedeće:
W - naprijed
S - leđa
A - lijevo
D - u pravu
F - stani
G - volan
K - prednja svjetla
L - isključeno prednje svjetlo
R - podići se
E - nizbrdo
Q - stop lift
T - nagnite se na sebe
Y - nagnuti se od sebe
H - zaustavni nagibni mehanizam




