


U ovom članku Čarobnjak će nam reći kako je napravio robotskog barmena kojim upravlja pametni telefon.
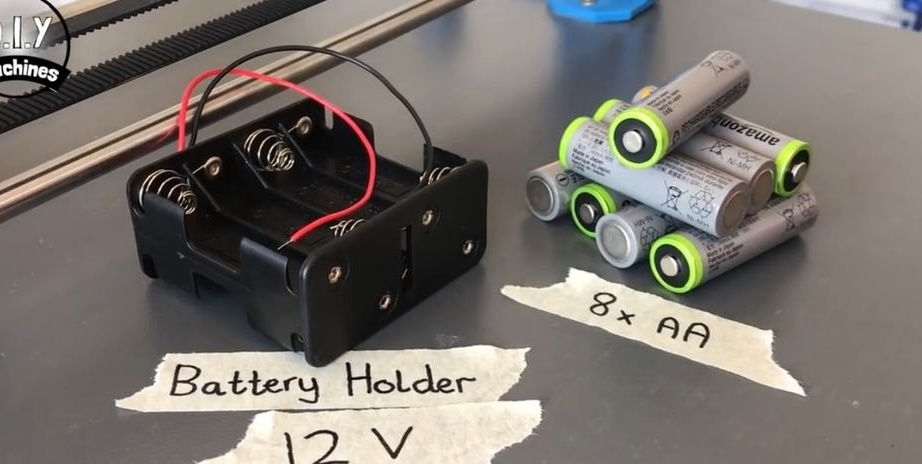
Značajke uređaja: rad na Arduinu, pristupačna cijena, bluetooth kontrola s bilo kojeg uređaja, autonomija (rad sa 8 AA baterija).
Za izgradnju takvog uređaja majstor je koristio sljedeće
Materijali i alati:
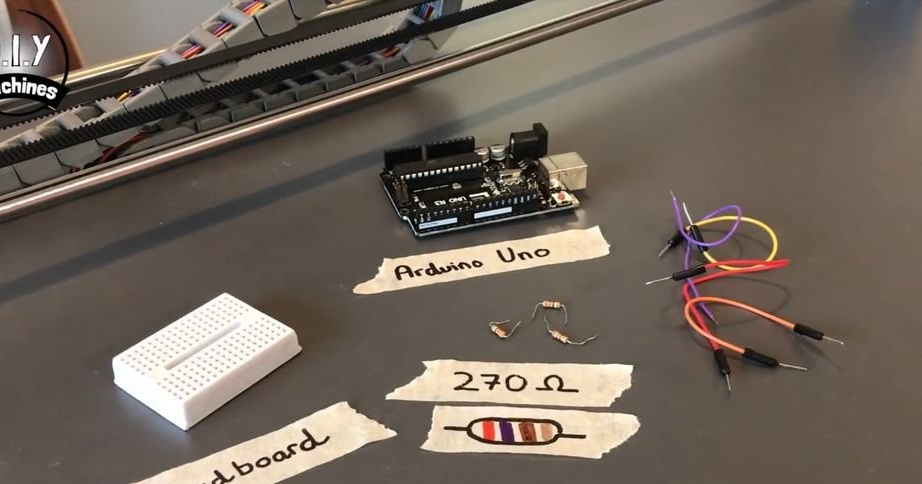
-Težak uno;
-Driver motor L293D;
- kontaktna sklopka;
-Linearni ležajevi;
-Stap motor;
-Belt i remenica (verzija 2m);
-Belt i remenica (verzija 5m);
-HM10 Bluetooth modul;
-Razvijač;
-Krepezh;
-Nozhki;
-Tab vrh;
-3D pisač;
-Metalne šipke;
- odvijač;
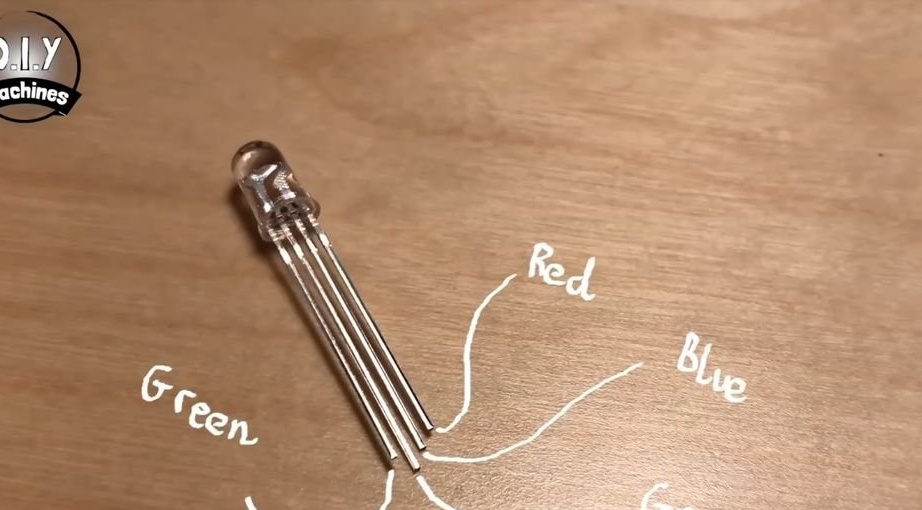
- RGB LED;
seeing-;
-Pribor za lemljenje;
-Izolenta;
-Polje za ljepljenje;
-Barilica;
-Konnektory;
Bateriju;
-Kompjuter sa softverom;
- Držači za boce;
-U ventila;
-Bottle;
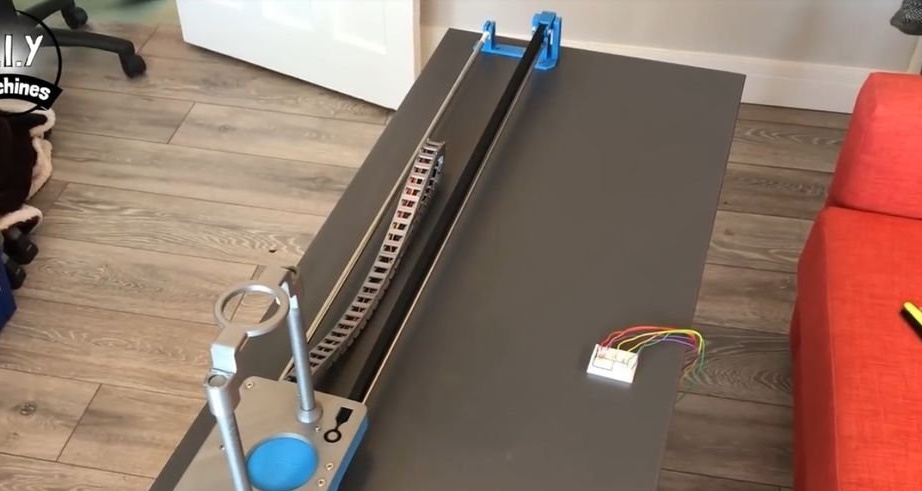
Prvi korak: Tabela
Prvo, majstor skuplja stol. Veličina stola 120 * 45 cm. Debljina stola 18 mm.


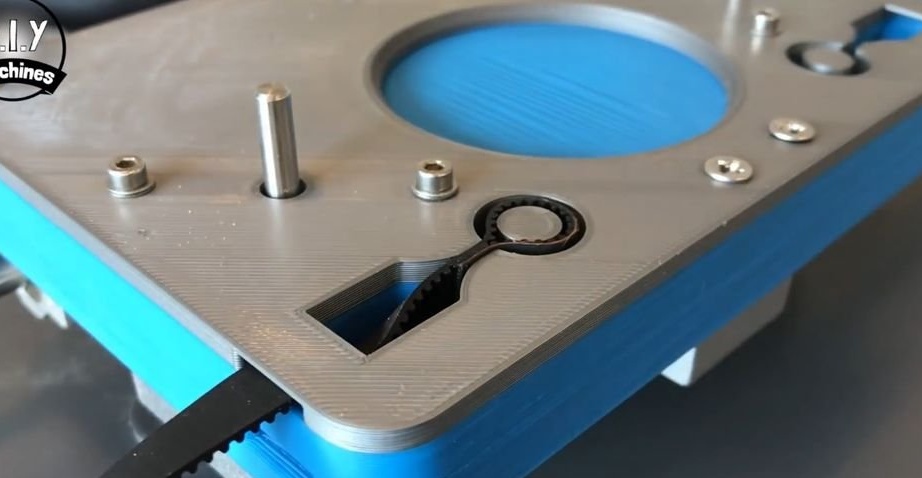
Drugi korak: Natezač
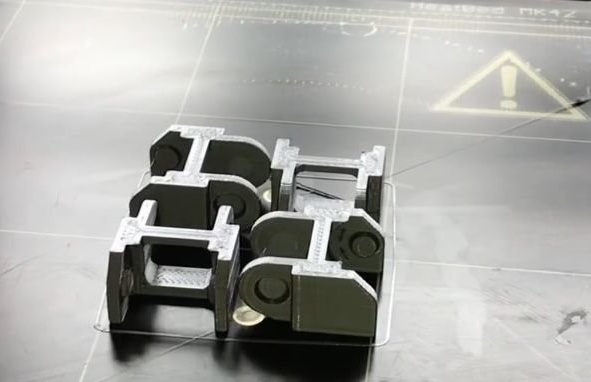
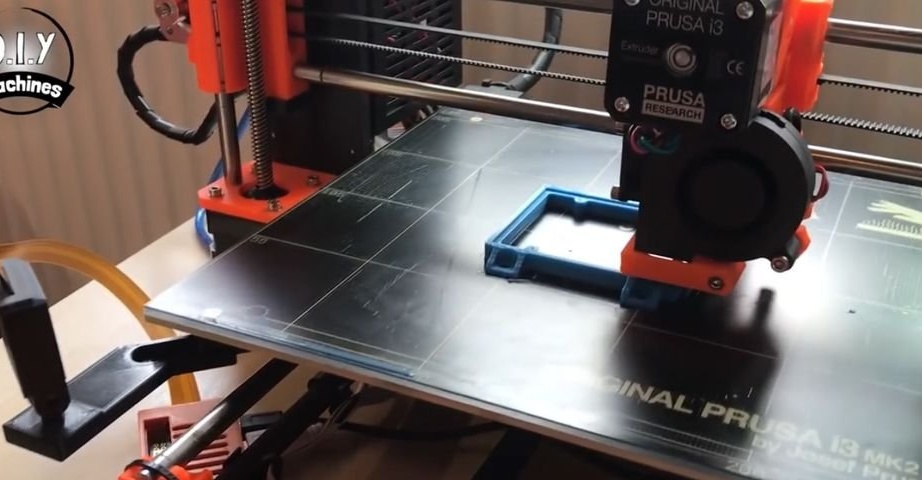
Datoteke za ispis dijelova možete preuzeti ispod.
Datoteke za 3D ispis.
Sada će biti potrebno ispisati prva dva detalja "idler.stl" i "Rod_Clamp_V5.stl".
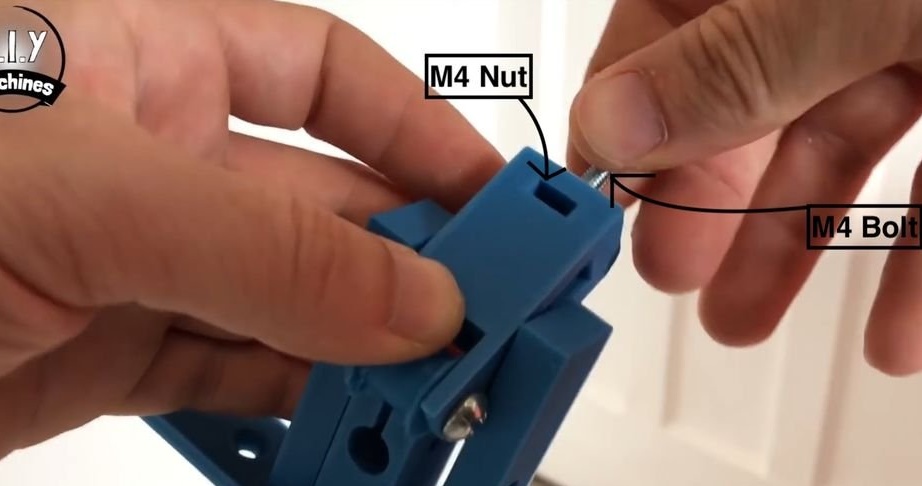
Nakon ispisa potrebno je pričvrstiti zatezni valjak na stezaljku pomoću dugog vijka i matice M4. Snažno stezanje nije potrebno, jer se valjak mora slobodno okretati.
Zatim su dva dijela spojena.
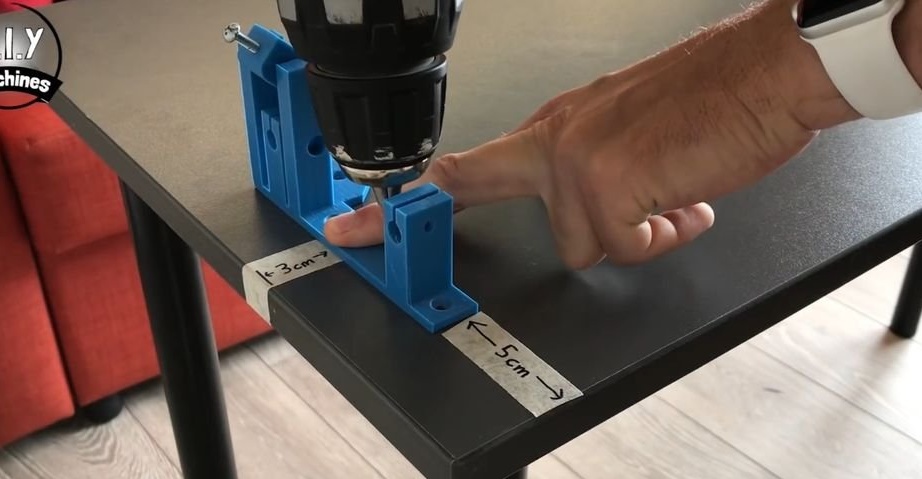
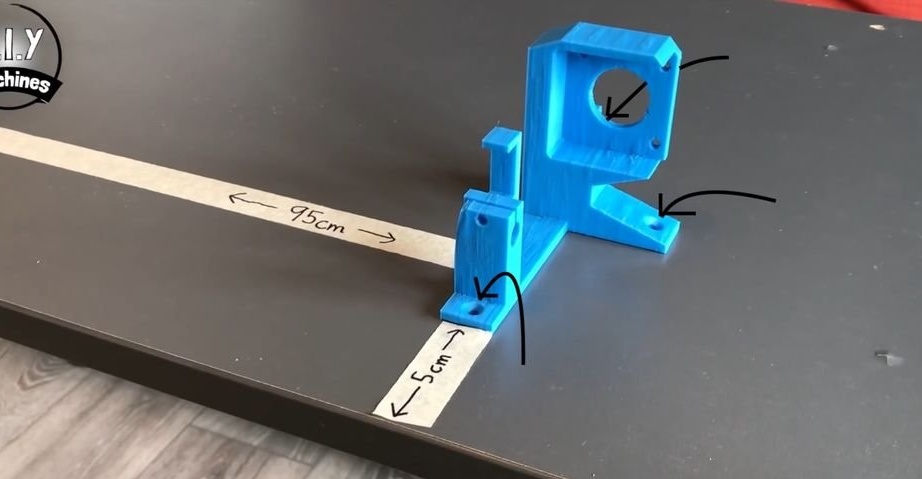
Označava stol na 3 cm od lijevog kratkog kraja i 5 cm od prednjeg ruba i zatezač zatezača.

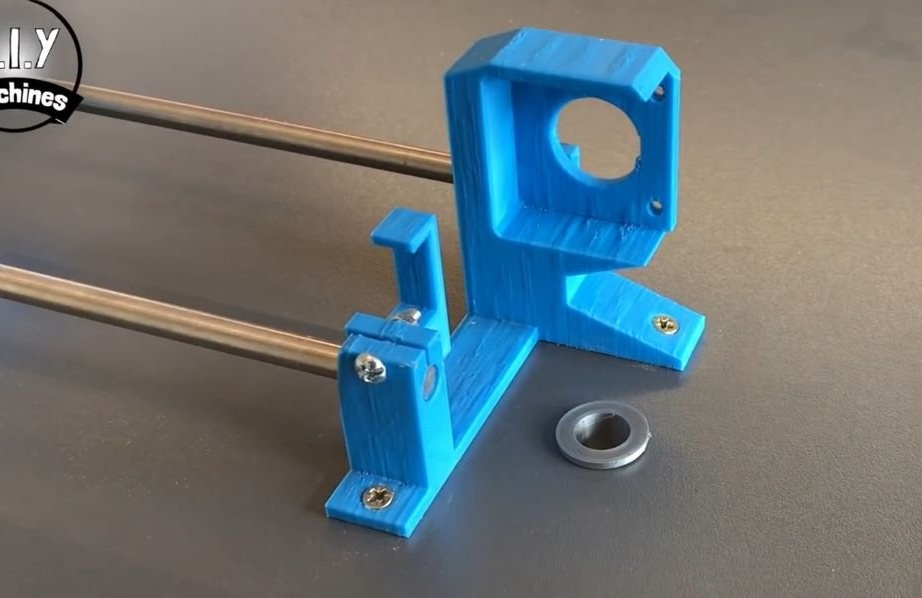
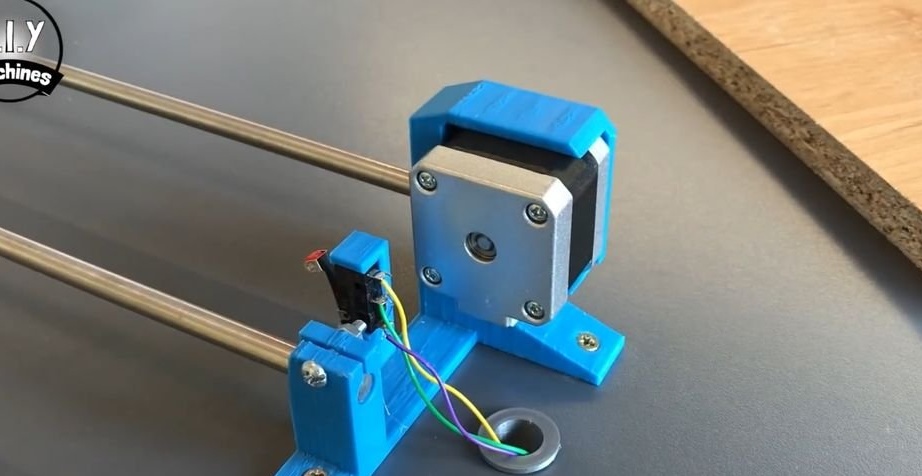
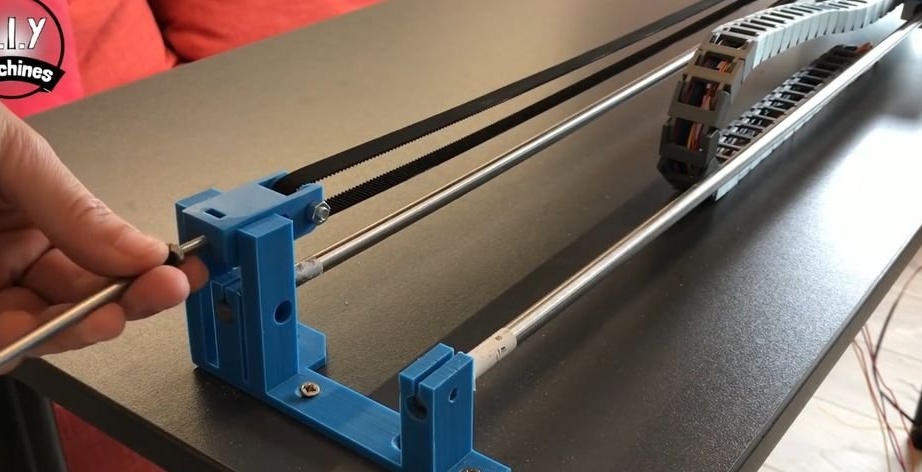
Drugi korak: nosač motora
Ispisuje nosač motora, datoteka "X_Axis_Motor_Mount.stl". Pričvrstite na radnu površinu na udaljenosti od 95 cm od zatezača i 5 cm od ruba stola.
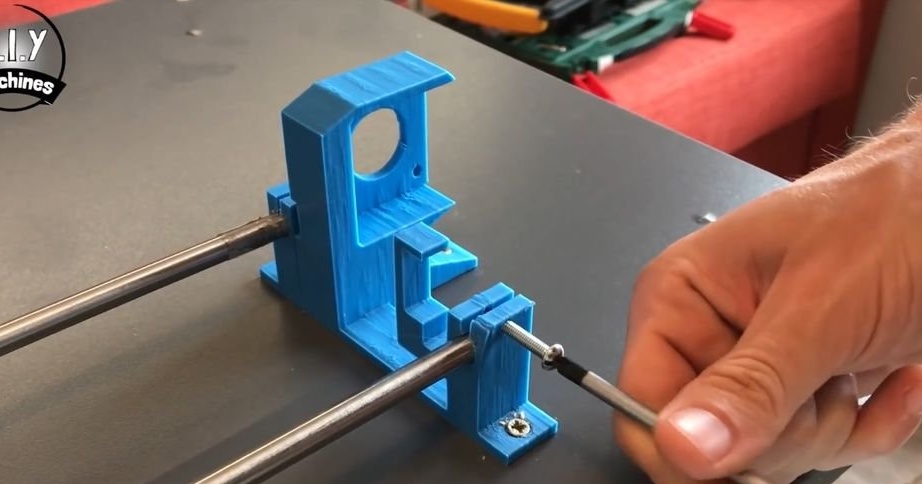
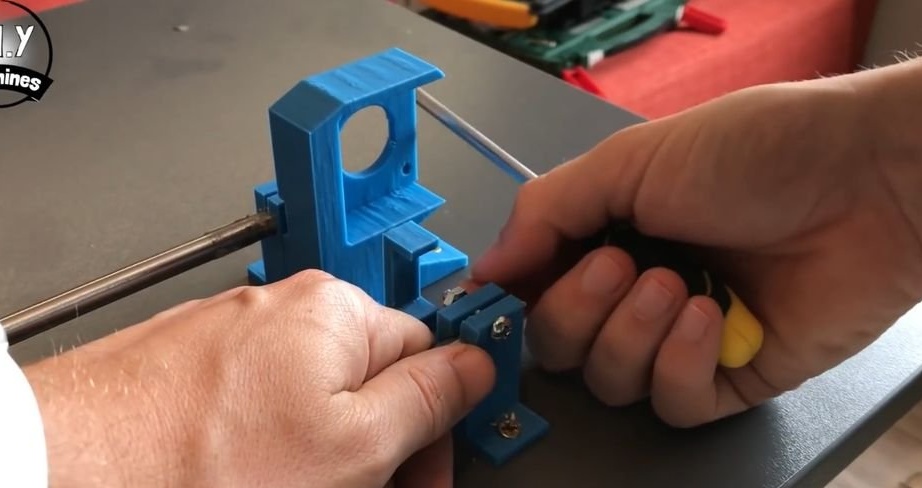
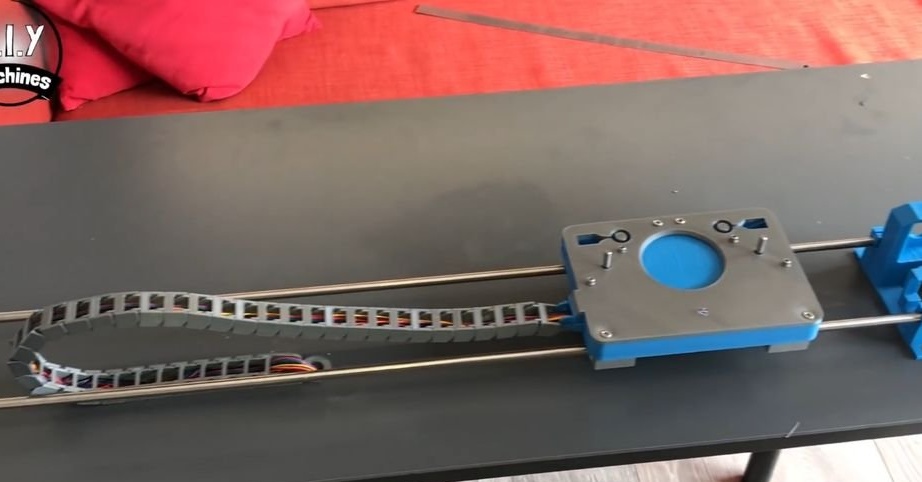
Treći korak: vodiči
Postavlja vodiče. Duljina šipki je 1 metar.
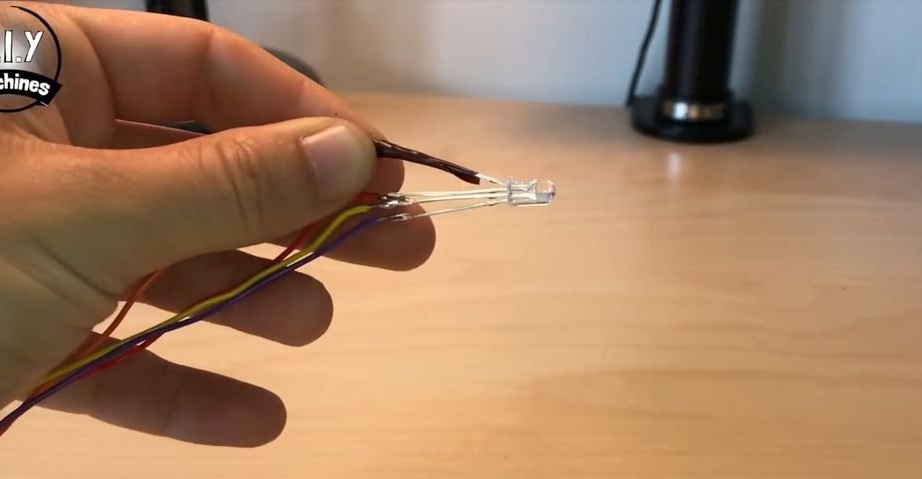
Četvrti korak: LED
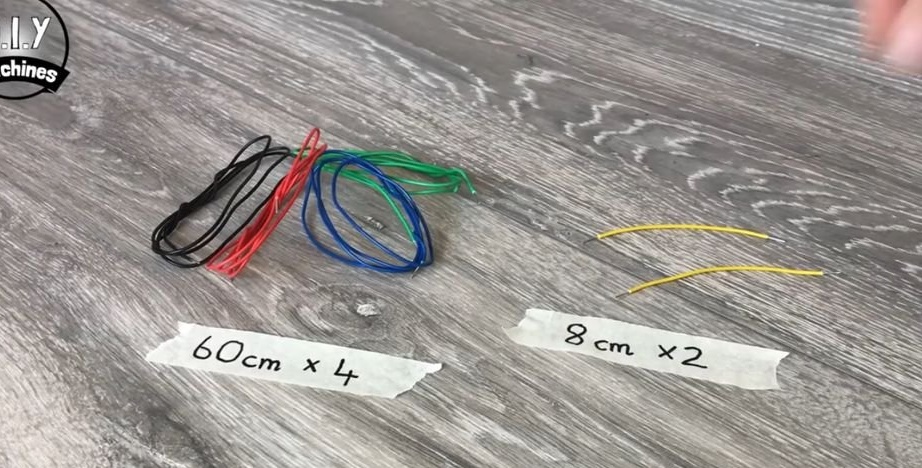
Nadređeni će upotrijebiti RGB LED za indikaciju. Lemite žice 180 cm različitih boja na svaku nogu. Spoj se izolira.




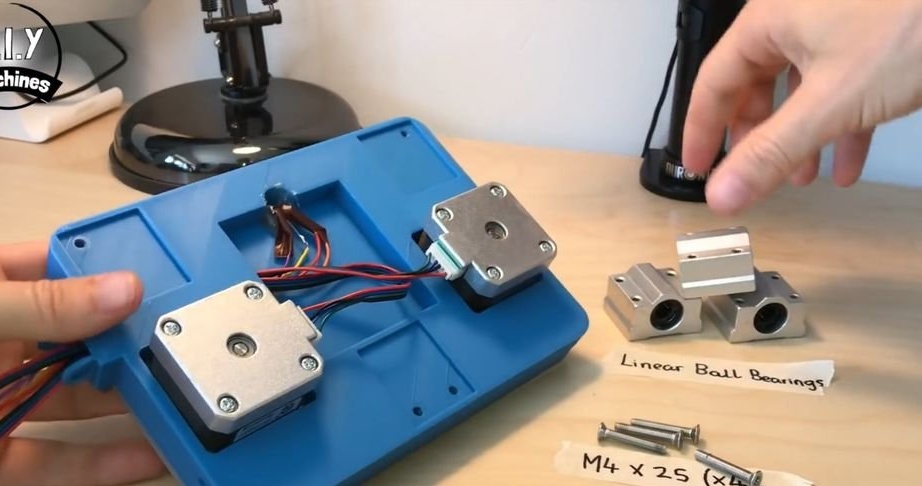
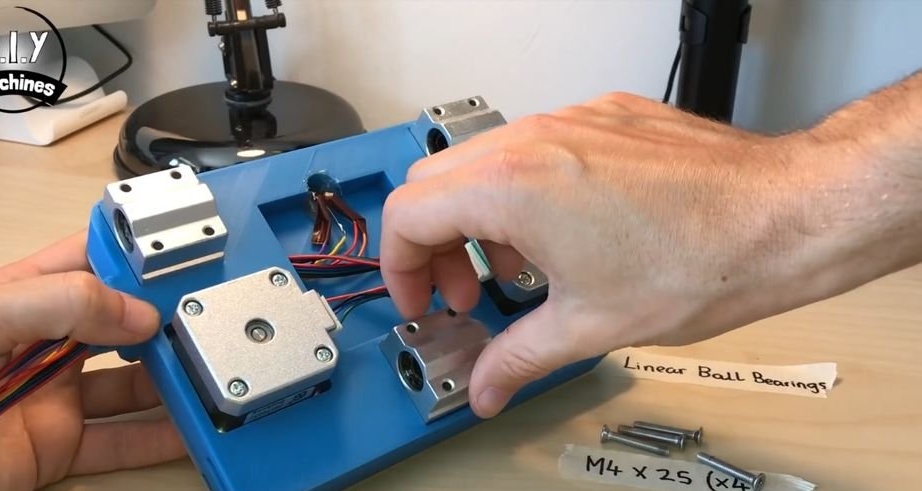
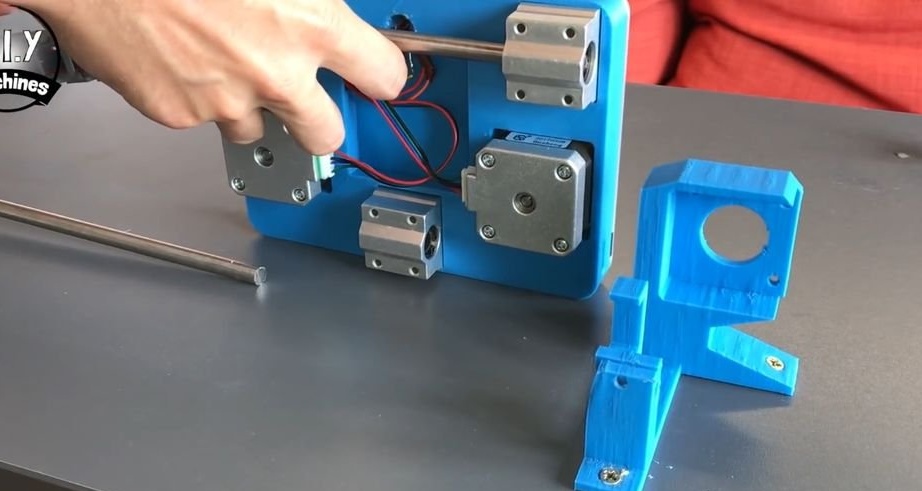
Peti korak: Platforma
Ispisuje dio 'slider_base_v3.stl'. Popravlja LED. Instalira koračne motore.
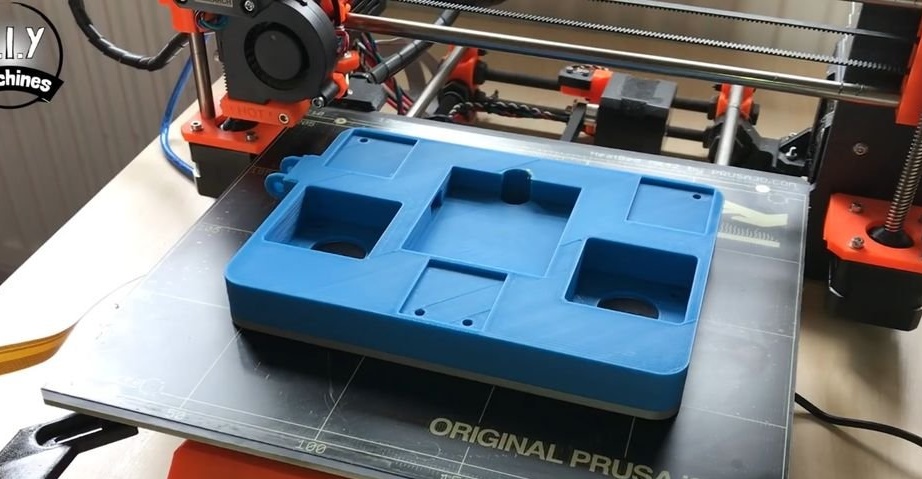

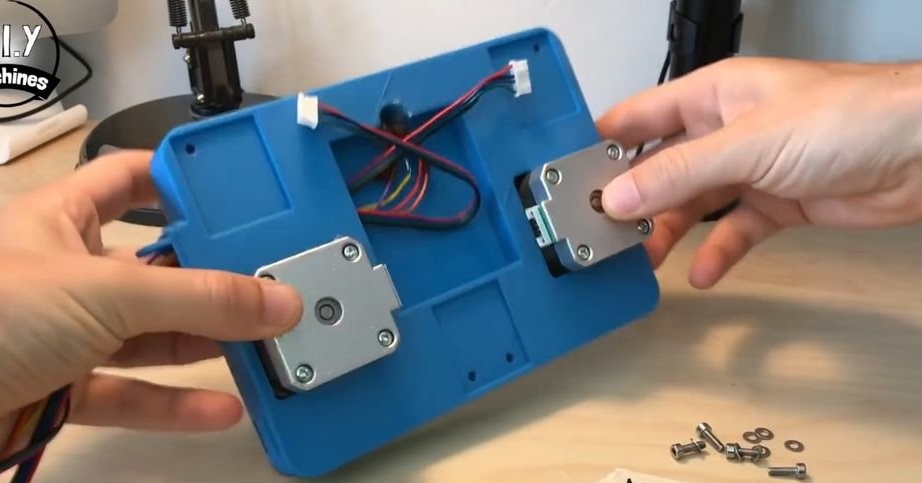
Ugrađuje linearne ležajeve.
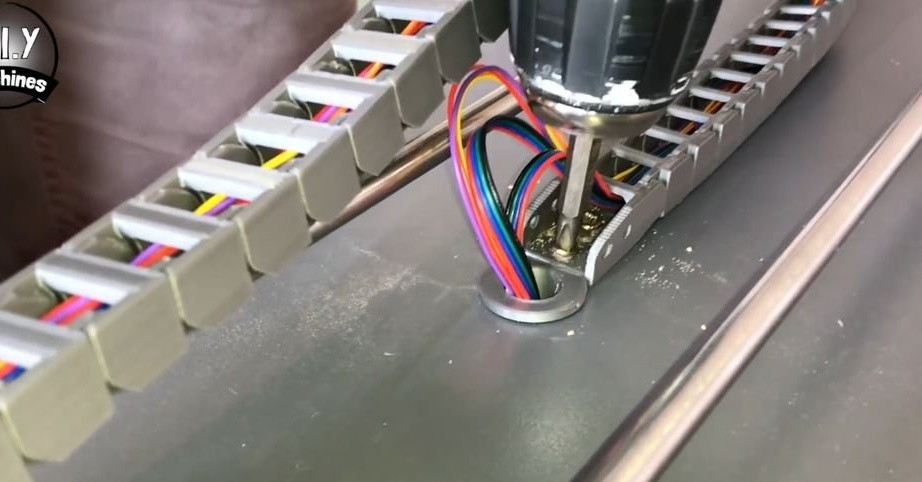
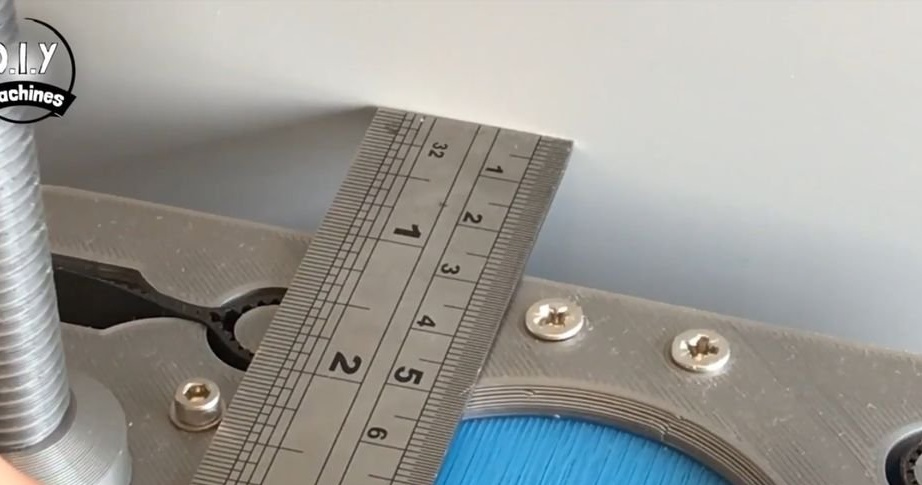
Korak šesti: Kabelski kanal
Kabelski kanal za uređaj sastoji se od zasebnih segmenata povezanih u jednom krugu.Unutar kruga položene su žice. Lanac je pomičan i savija se ako je potrebno. Lančani segmenti također su ispisani na pisaču.


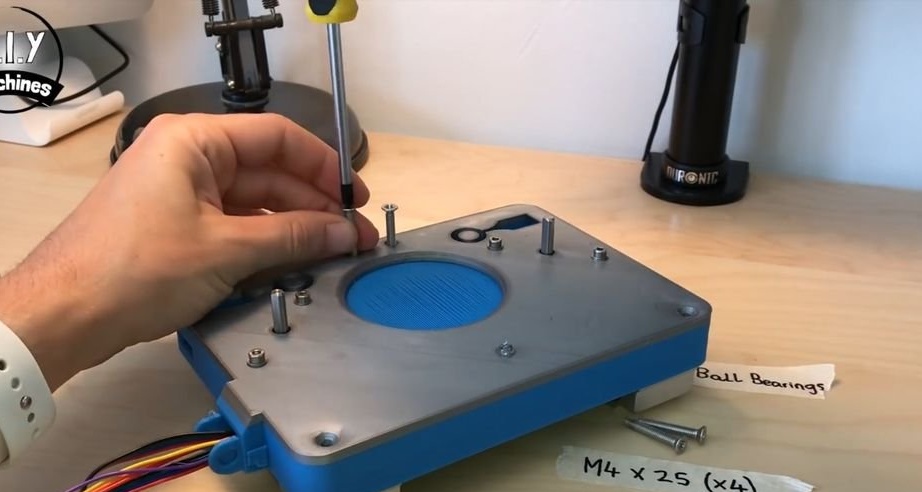
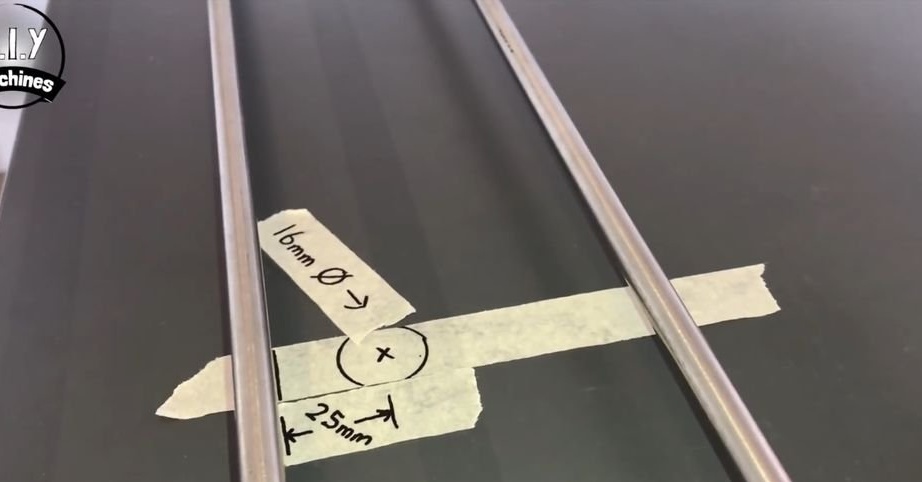
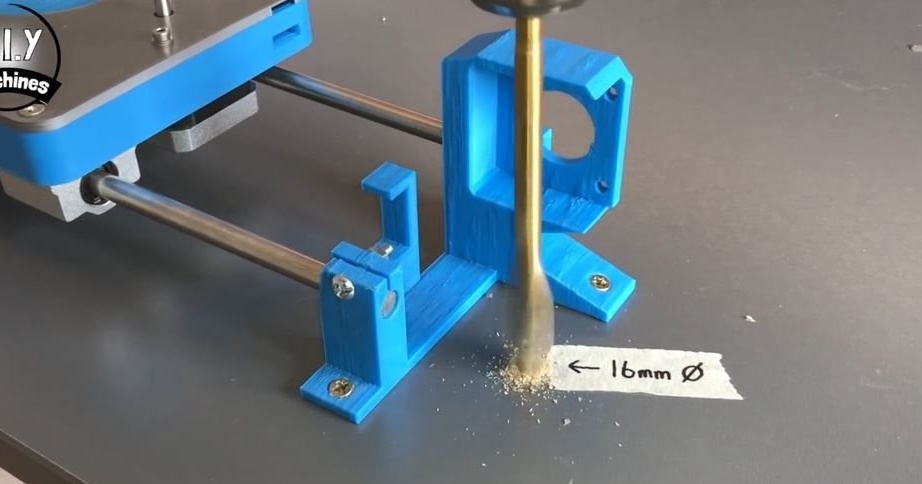
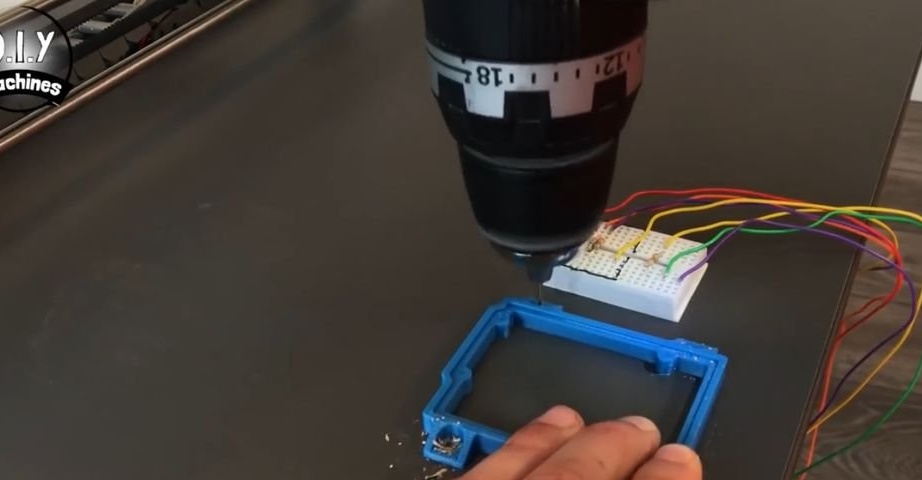
Na udaljenosti od 25 mm od krajnjeg vodiča i 47 cm od zatezača, izbušite rupu od 16 mm. Umetne čahuru "Table_Tidy.STL" u otvor. Pričvršćuje kabelski kanal jednim krajem na platformi, a drugi na radnoj površini pokraj rukava. Proteže žice.



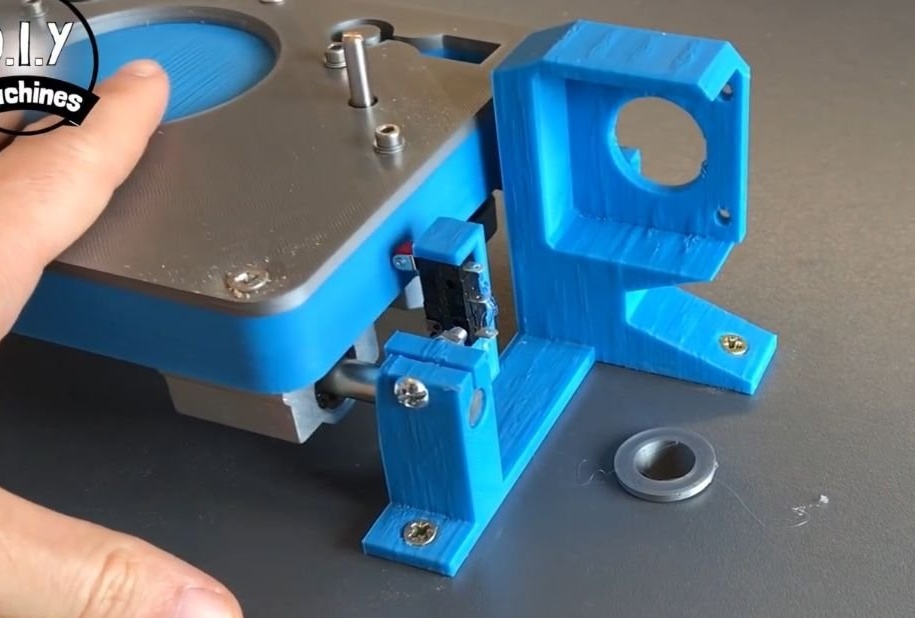
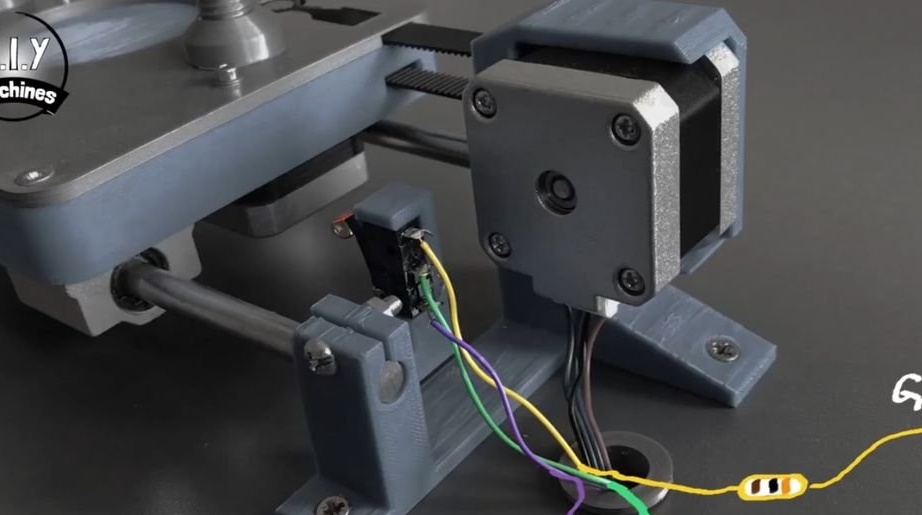
Sedmi korak: prebacivanje
Pored nosača motora izbušena je još 16 mm rupa. Umeće rukav u njega. Pričvrstite prikolicu na nosač. Lemljenje do njegovih kontakata za 1 metar žice.

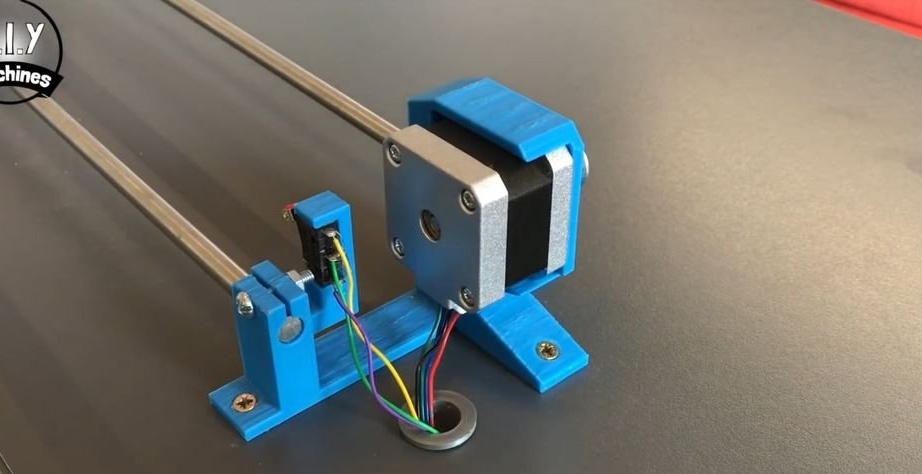
Osmi korak: Motor X-osi
Osigurava ugradnju motora.

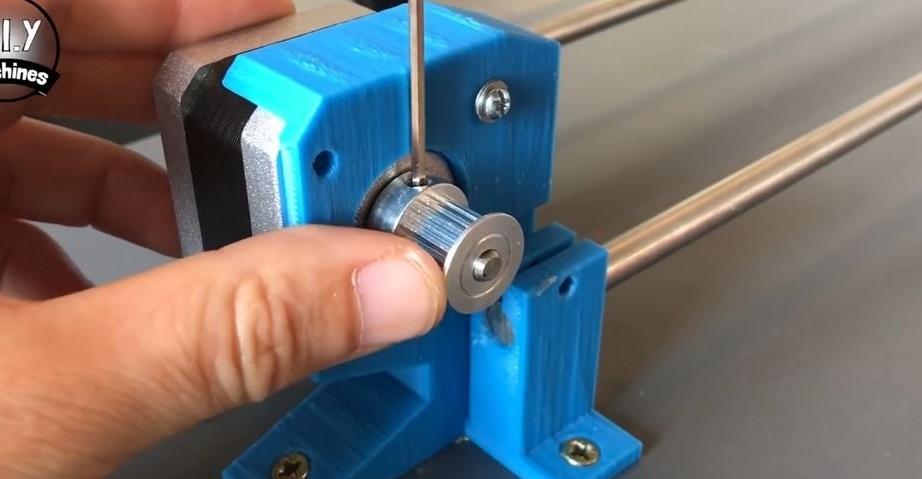
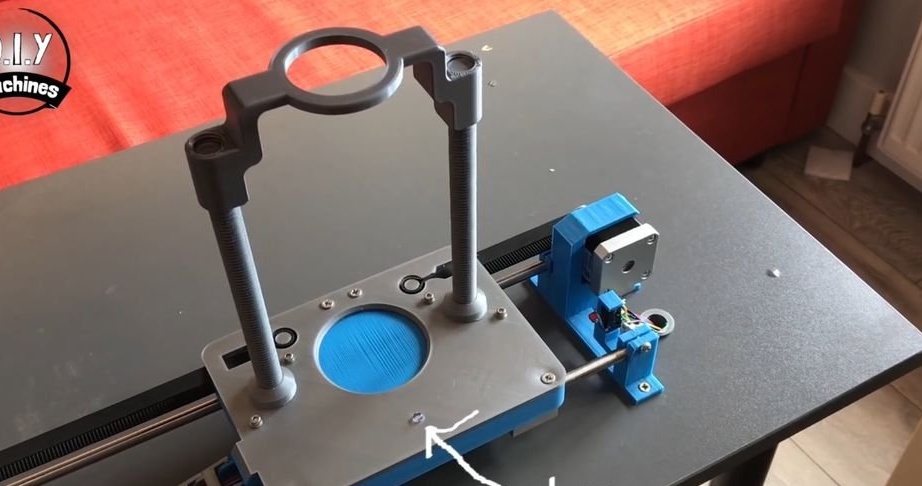
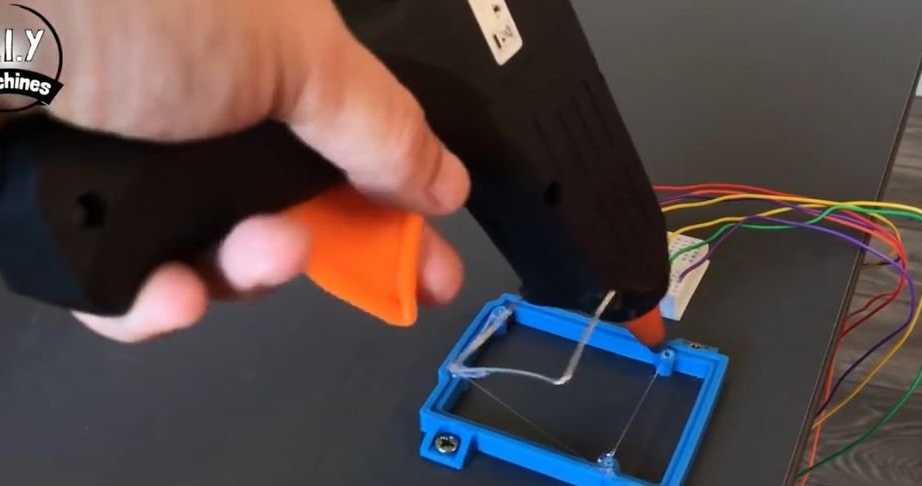
Korak devet: Remen
Pričvrstite remenicu na osovini motora. Pričvršćuje kraj pojasa na držače platformi. Vuče remen kroz remenicu i kroz remenicu zatezača. Drugi kraj pričvršćuje na držače. Ako je potrebno, napetost remena možete prilagoditi zatezanjem ili odvrtanjem vijaka.







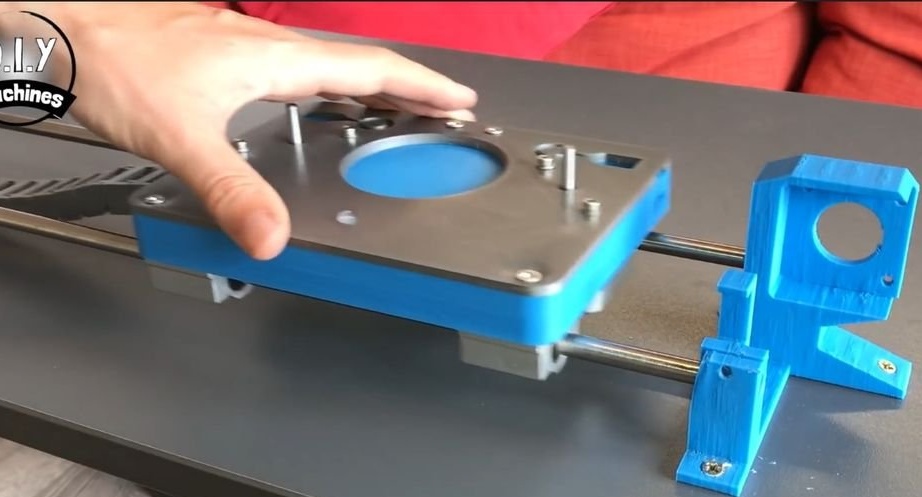
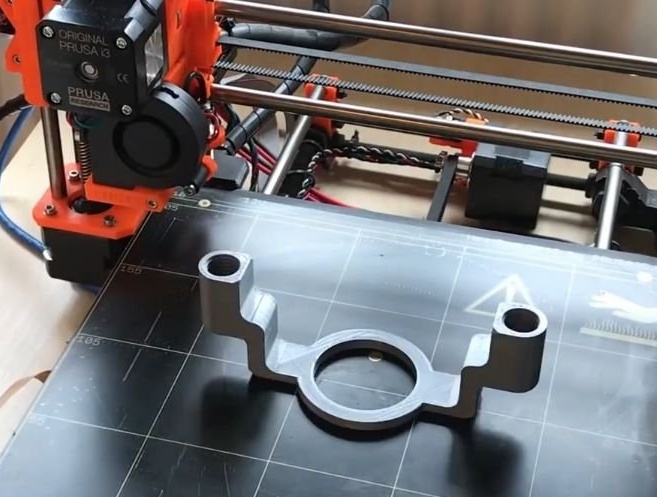
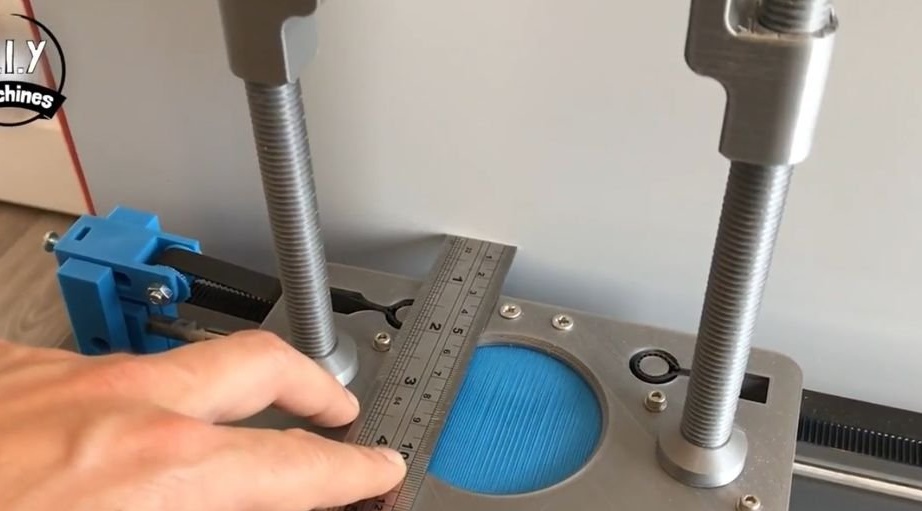
Korak deseti: Nosač čaša
Ispisuje dvije šipke s navojem main_rod2.3.STL i držač Dispenser_Paddle_V2.STL. Pričvršćuje se na platformi.



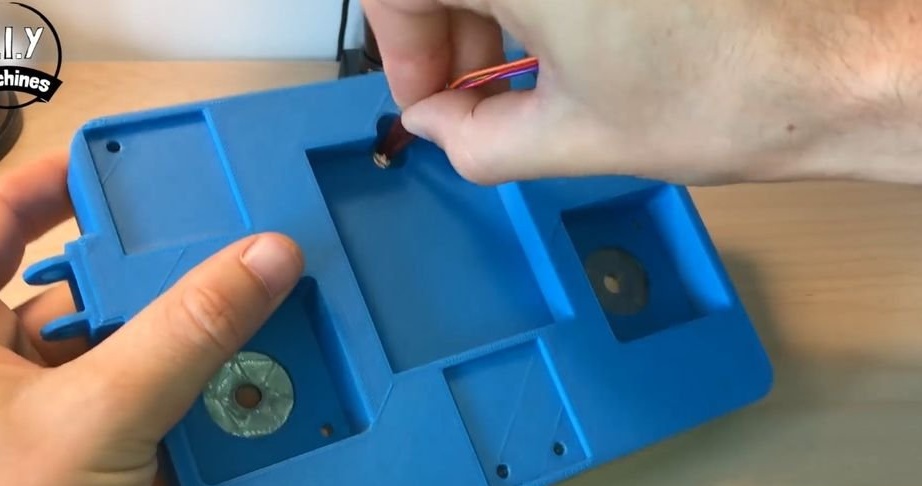
Korak jedanaesti: indikator, prikolica, ploča
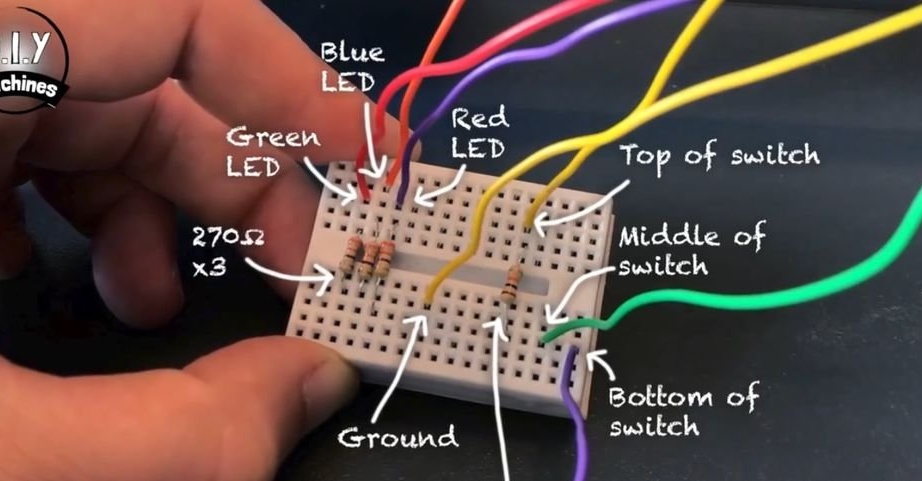
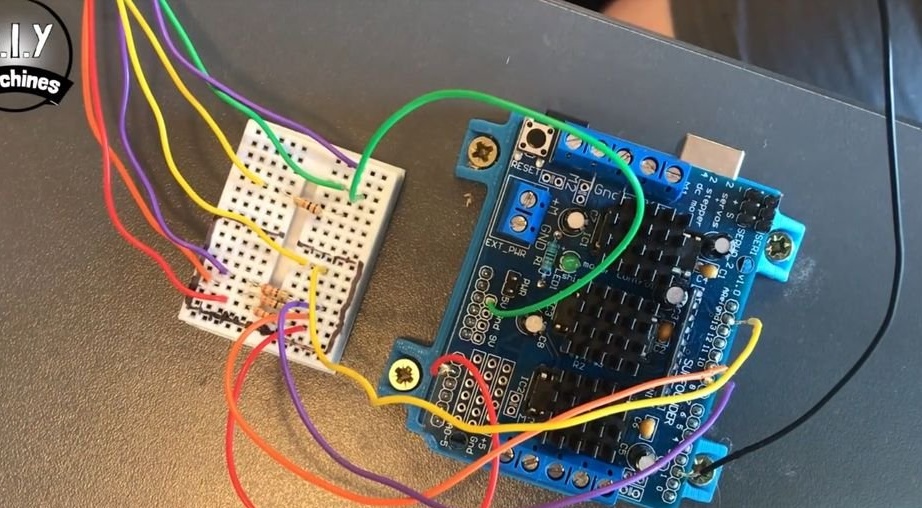
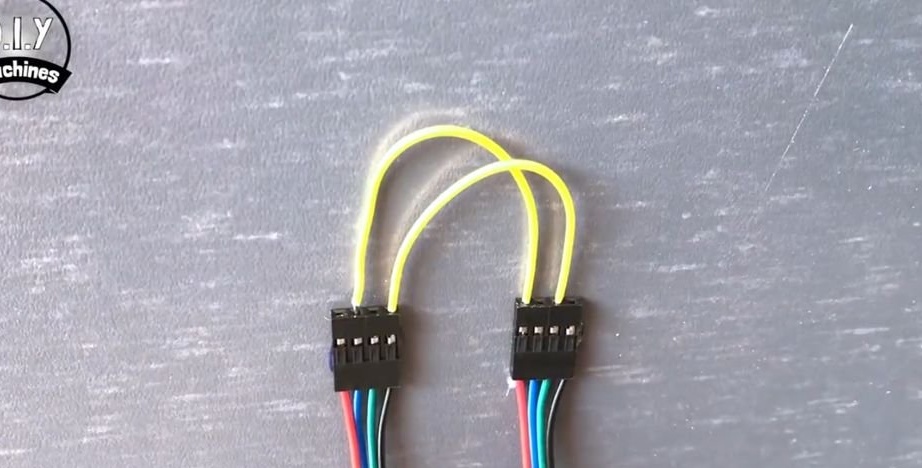
RGB LED, ima četiri noge. Jedna noga je uobičajena, a tri u boji. Majstor uzima još četiri žice, duljine oko 15 cm, i prodaje ih na sljedeći način (prema bojama LED svjetla) na modul pokretača motora:
Crveno na pin D9
Plava za pin D10
Zelena na pin A1
Katoda na GND pin.
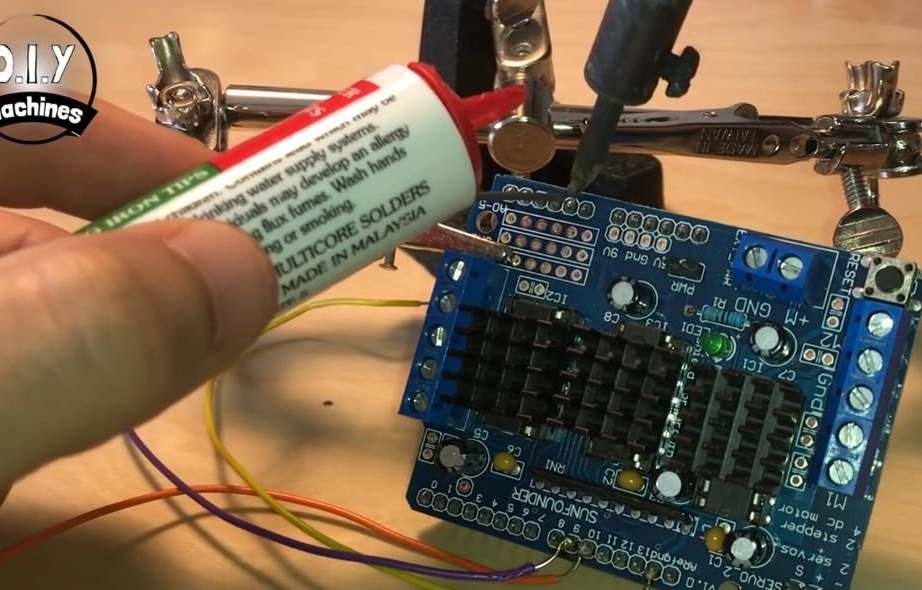
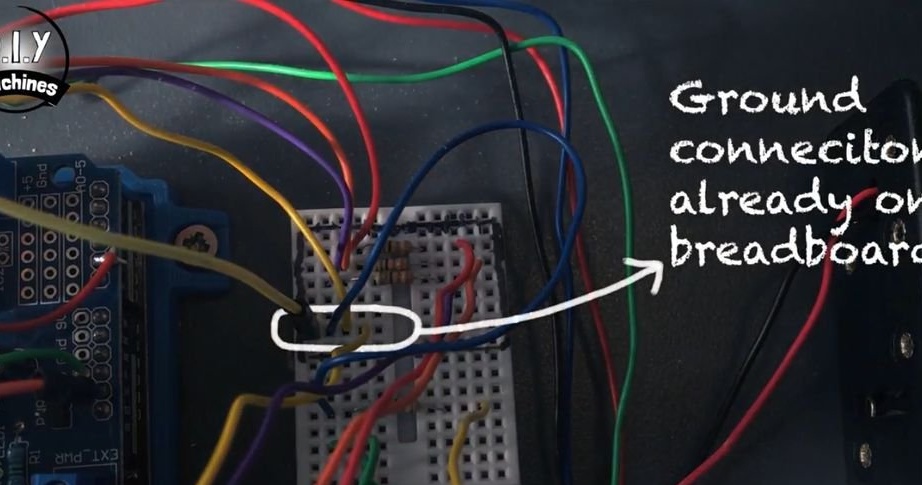
Povezuje prikolicu: gornji kontakt je GND, srednji kontakt 5 V, donji kontakt br. 2.
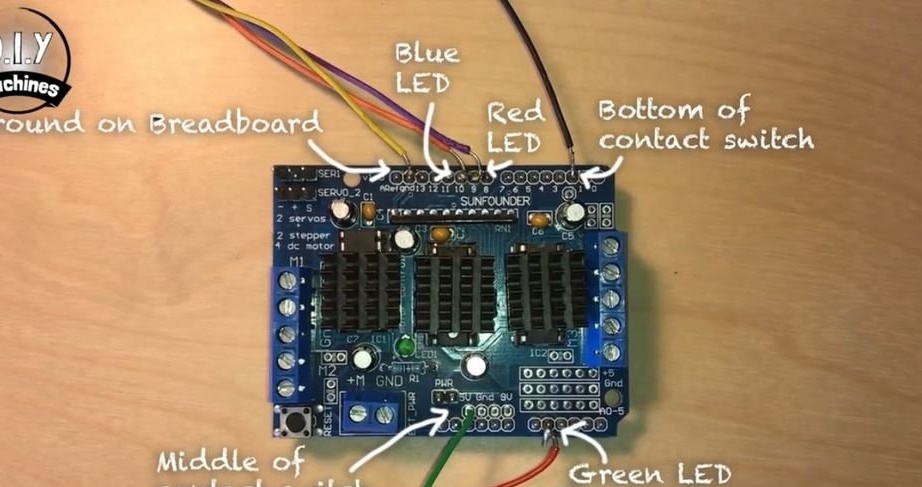
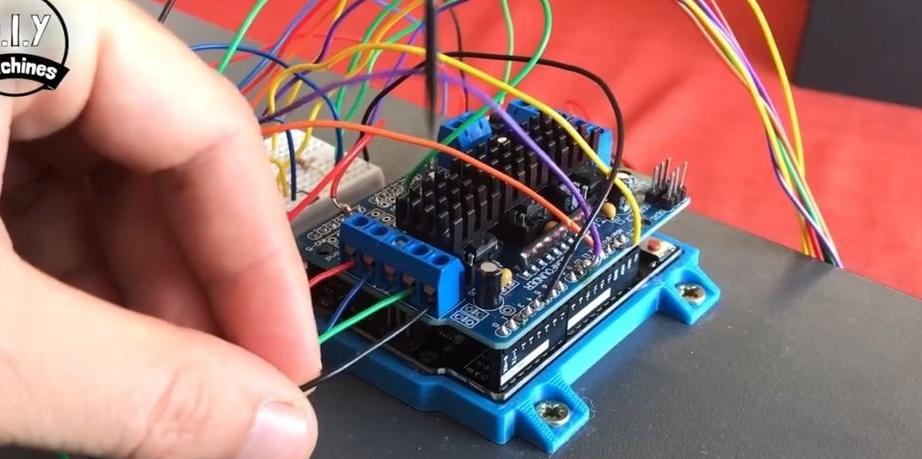
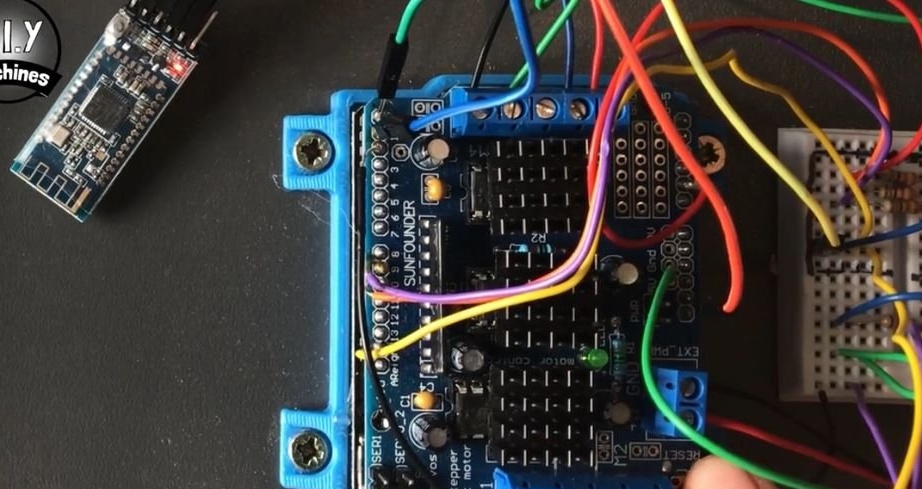
Dalje montira sve na ploču (vidi fotografiju). Pričvrstite ploču za stol.
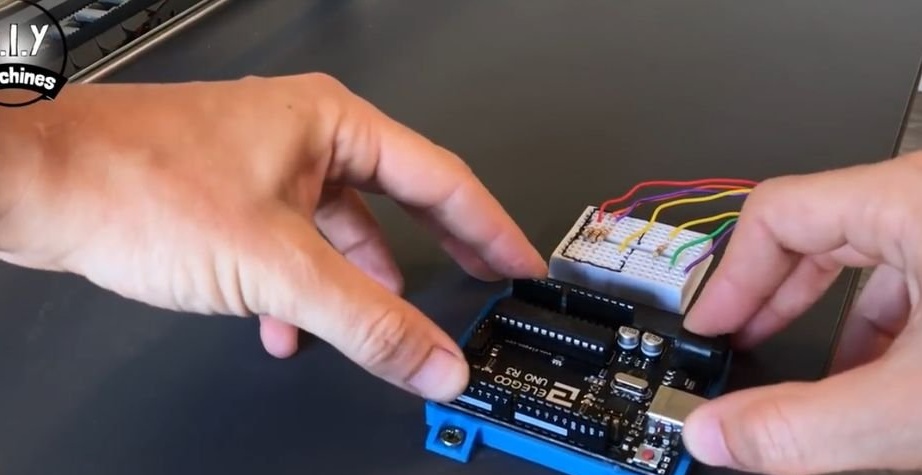
Dvanaesti korak: Arduino
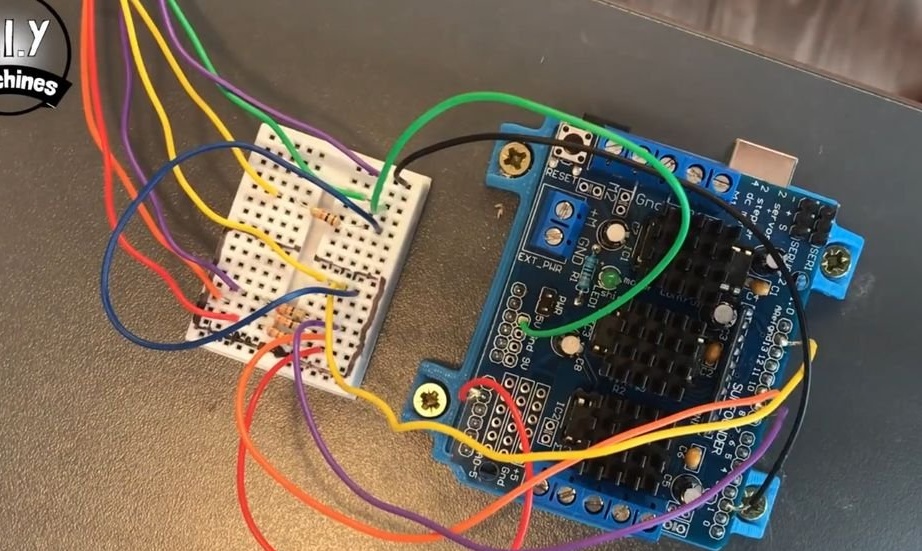
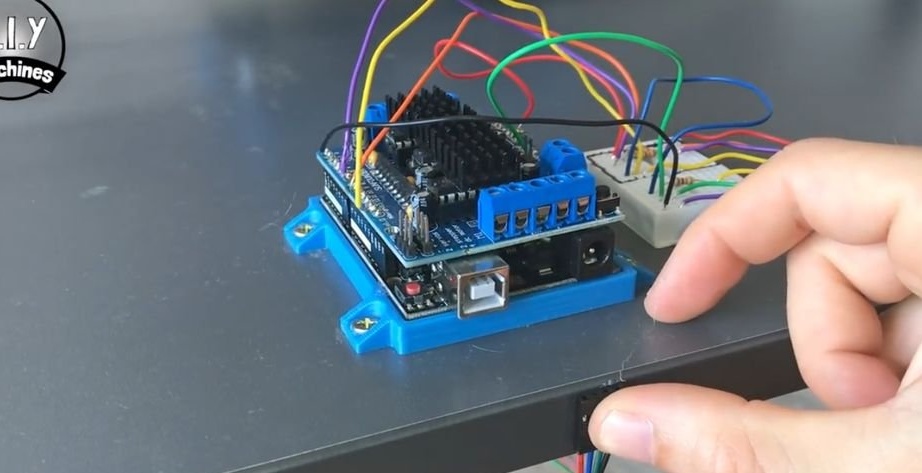
Ispisuje montažnu ploču za Arduino. Pričvrstite tanjur za stol. Pričvršćuje se na tanjur Arduino. Instalira modul pokretača motora na Arduino.
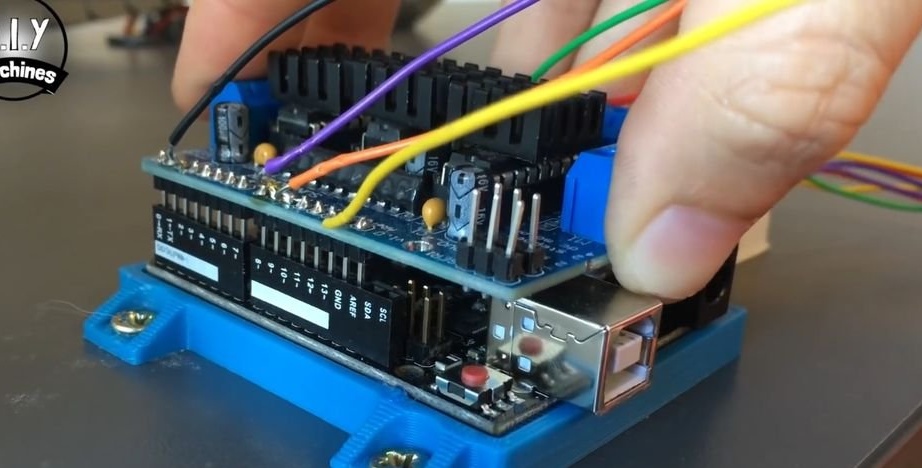
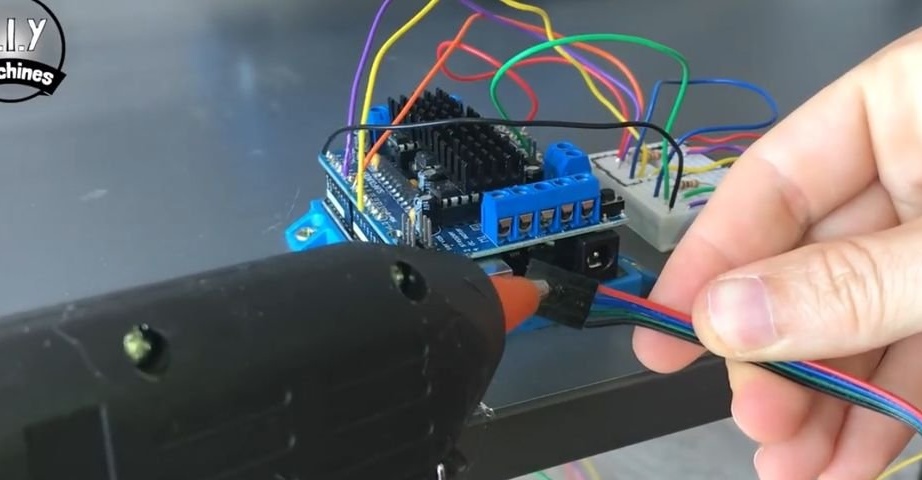
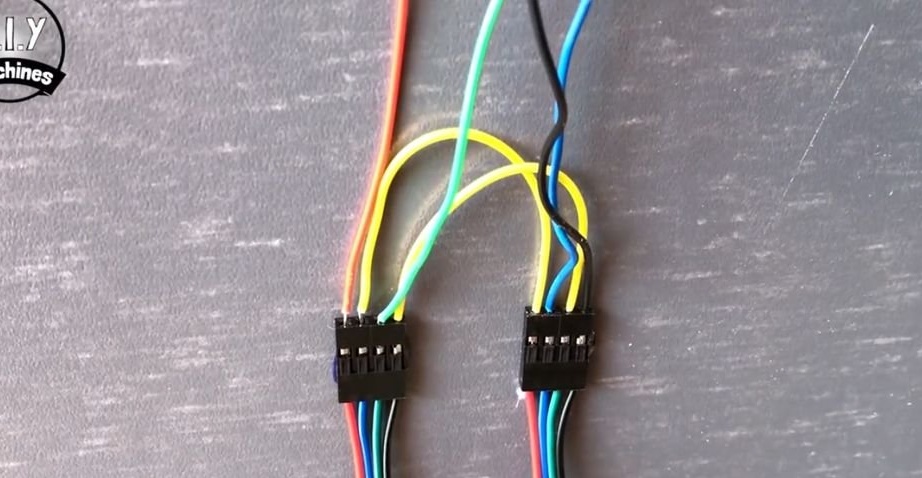
Povezuje žice od vozača i ploče, kao na fotografiji.
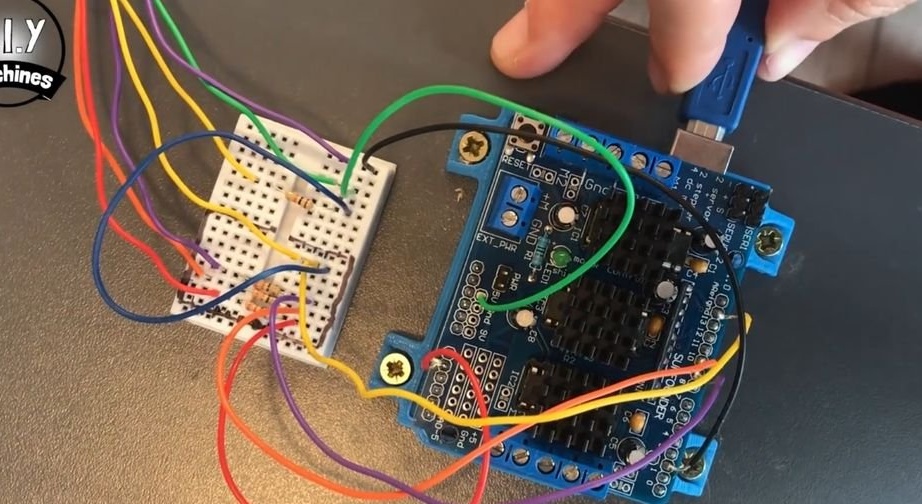
Korak trinaesti: Preuzmite kod
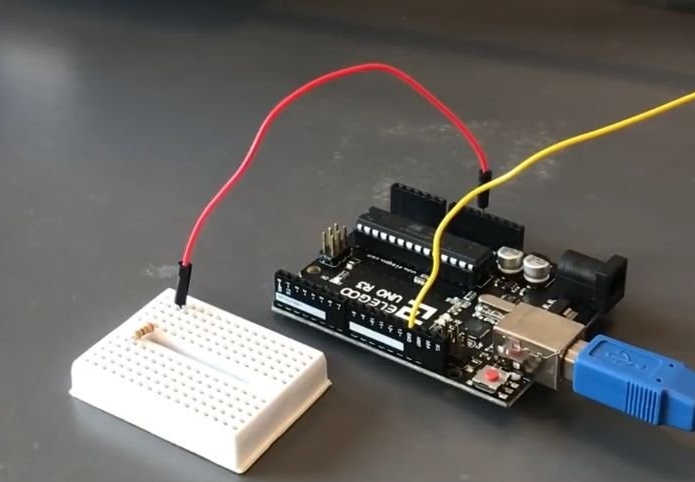
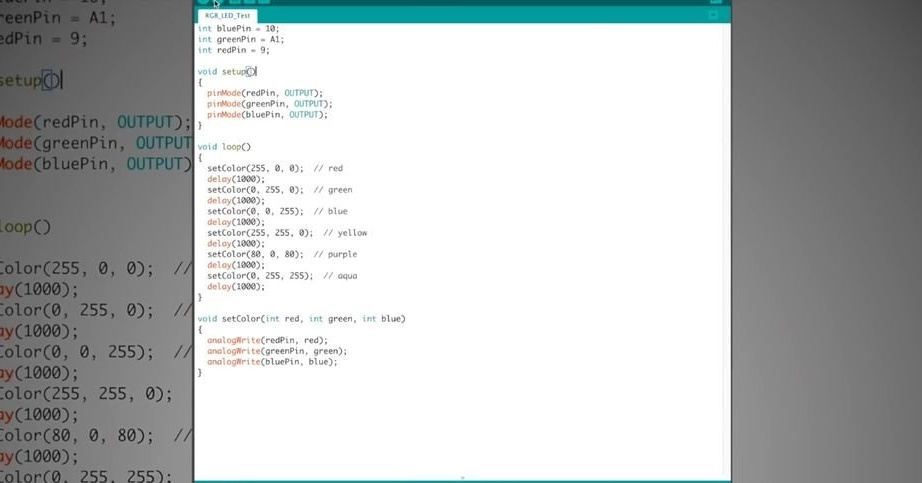
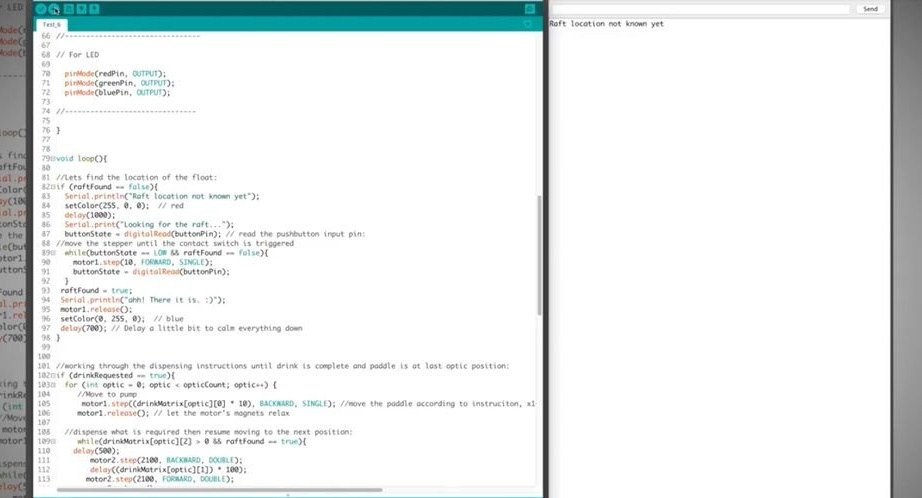
Spaja Arduino na PC i preuzima kôd. Kod se može pronaći ovdje.
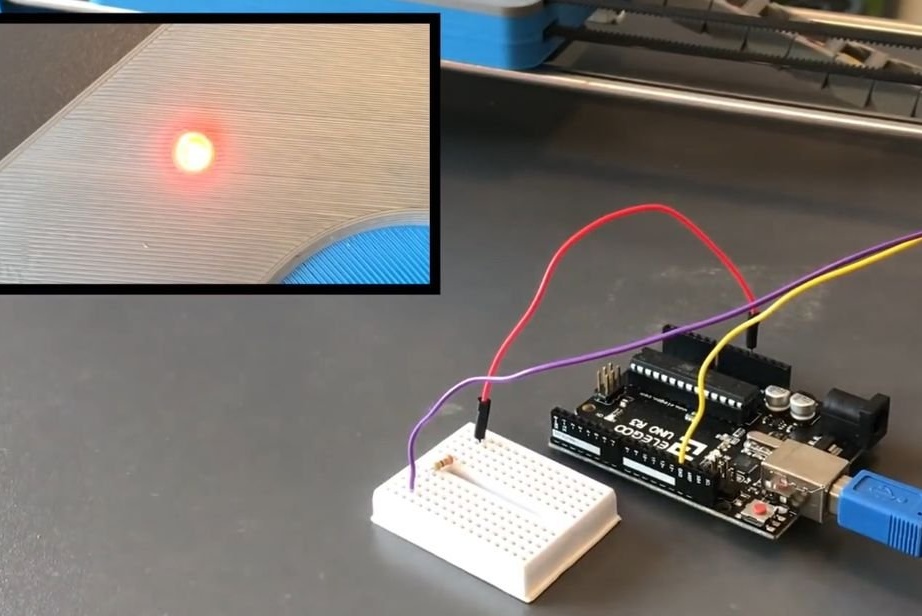
Pokreće LED test kod. LED mora svijetliti u različitim bojama.
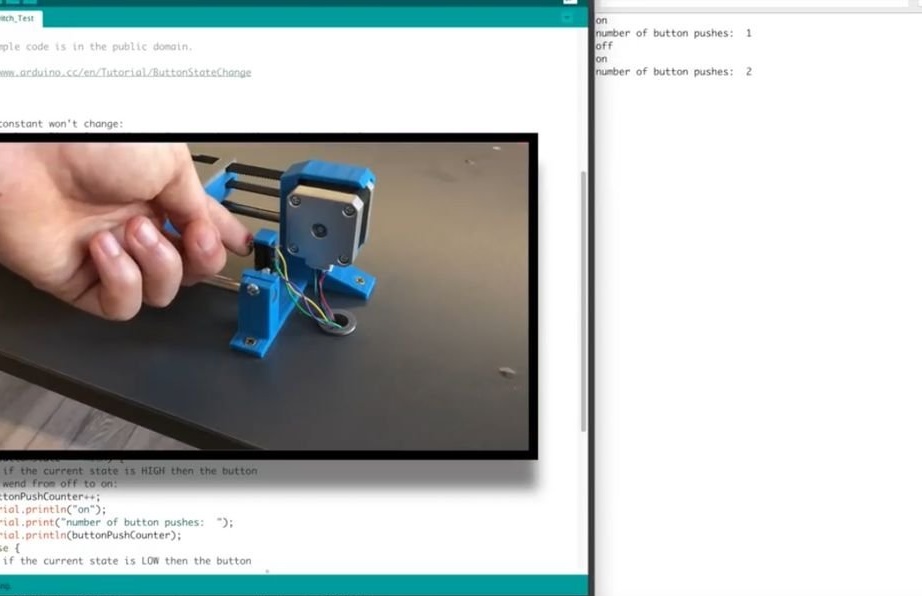
Sljedeća skripta za preuzimanje je "Contact_switch_test". Čim se učita, na pritisku bi trebao biti prikazan svaki pritisak granične sklopke.

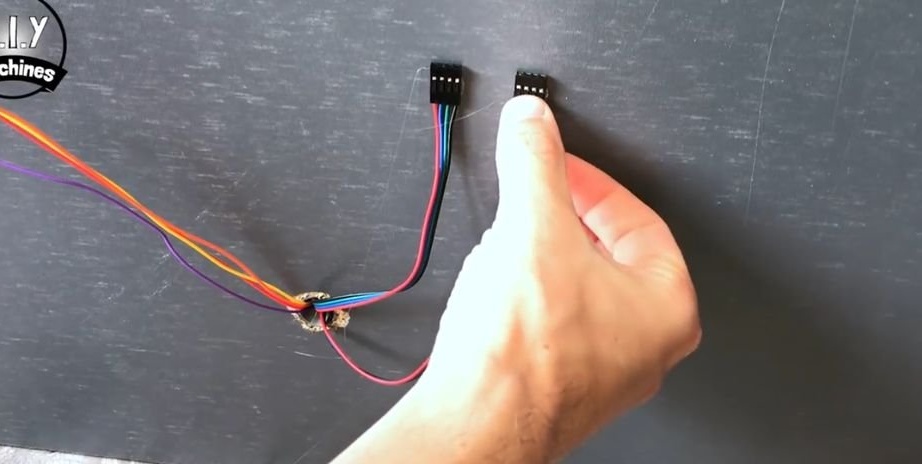
Četrnaesti korak: povezivanje X i Z motora
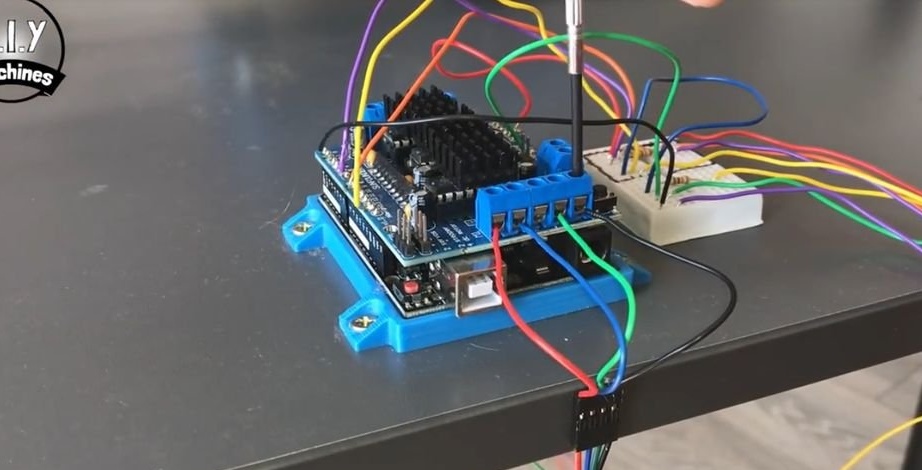
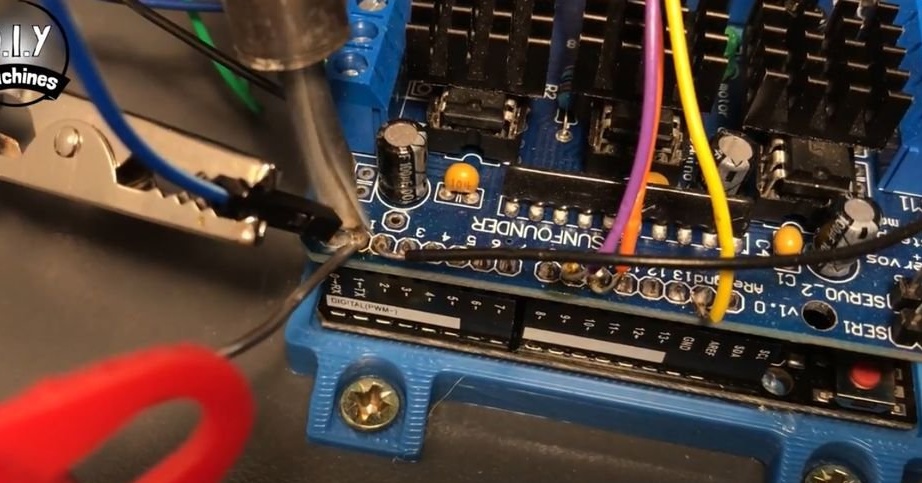
Pričvrstite konektor koji dolazi s motora X preko ploče na stolu. Povezuje se s upravljačkim žicama.
Povezuje koračne motore na osi Z.
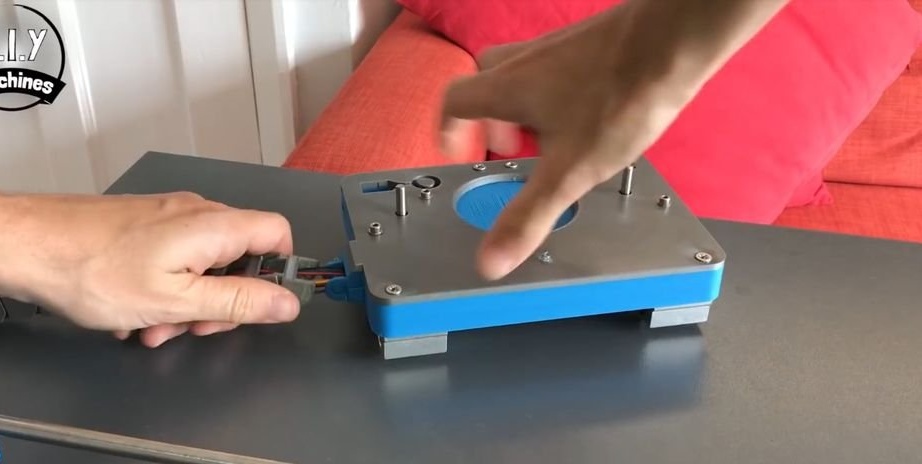
Korak petnaesti: pretinac za bateriju
Uklanja skakač na modulu. Povezuje odjeljak za baterije.
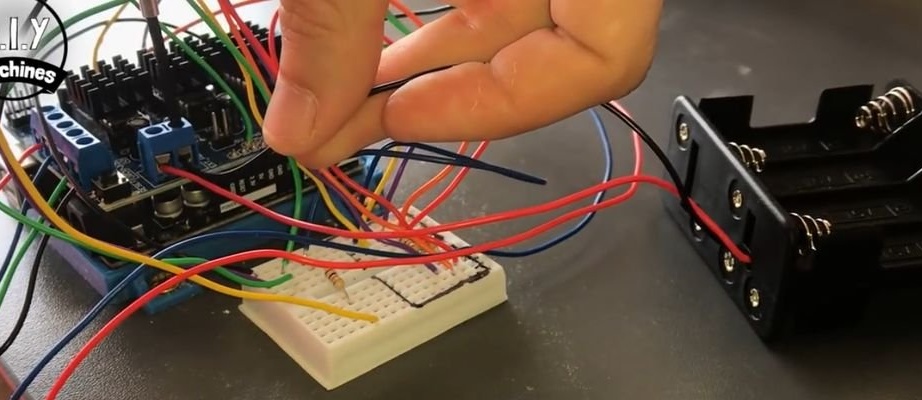
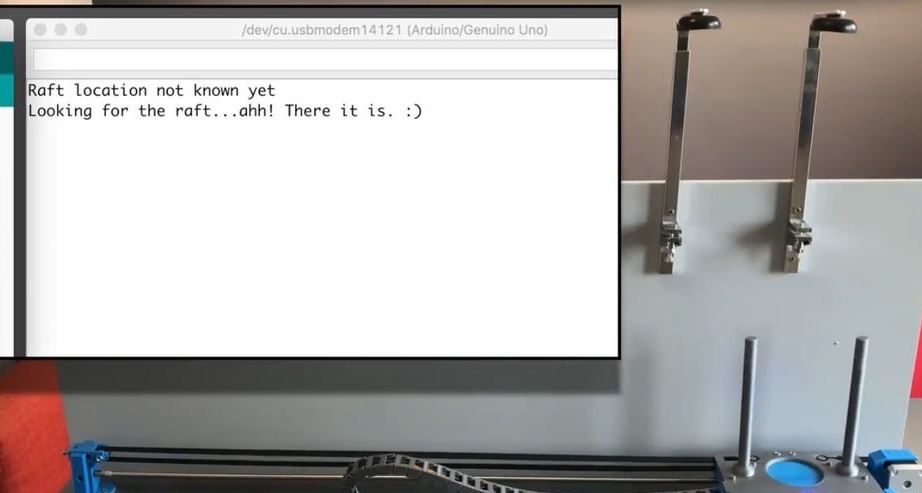
Sada možete pokrenuti "test 1". Crvena LED lampica trebala bi svijetliti i platforma treba stići do graničnog prekidača. Tada će LED svijetliti zeleno.
Korak šesnaesti: nosači za boce
Korištenjem nosača pričvršćuje se stražnji zid od MDF-a.




Nadalje pomiče platformu 1 cm od granične sklopke. Poravnava držač čaše i pričvršćuje držač boce s dozatorom (nažalost, majstor nije dao opis izrade ili kupnje držača). Dalje. držači su pričvršćeni svakih 12 cm.



Korak sedamnaesti: kod, kalibracija, test
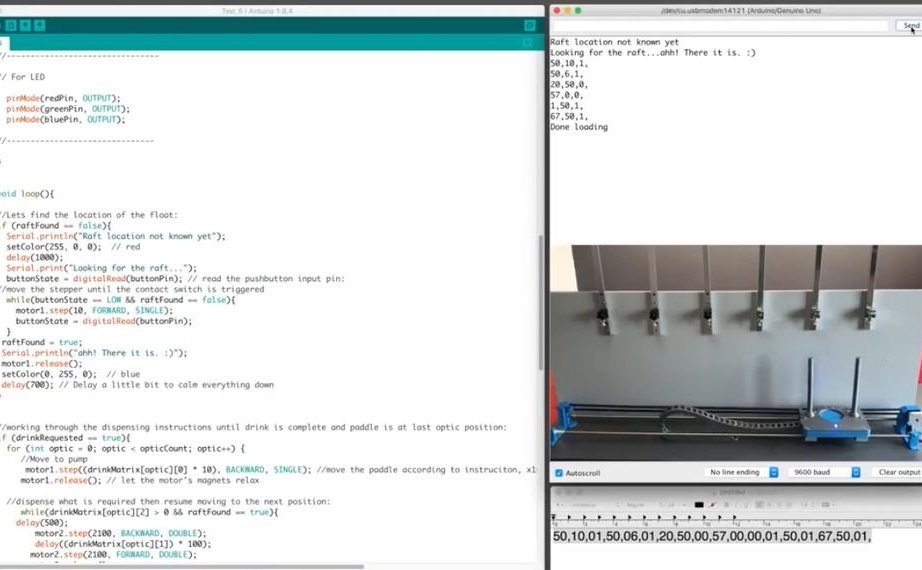
Učitava se glavni kod na https://www.thingiverse.com/thing:2478890
Sljedeće su vrijednosti postavljene u postavci: 50,10,01,50,06,01,50,50,00,57,00,00,50,50,02,50,50,00. Majstor ima šest dozatora. U postavkama postoji šest skupina od tri, gdje je prva znamenka udaljenost od graničnog prekidača, prvi raspršivač, drugi raspršivač itd., Druga znamenka je vrijeme pića izliveno u čašu, treća je broj izlijevanja. Sve ove vrijednosti po potrebi se mogu mijenjati.


Prvo piće koje je uređaj pripremio bio je gin i kola. Da biste izjednačili tlak u boci s kolom, morate napraviti rupu. Zatim čarobnjak postavi potrebne parametre.



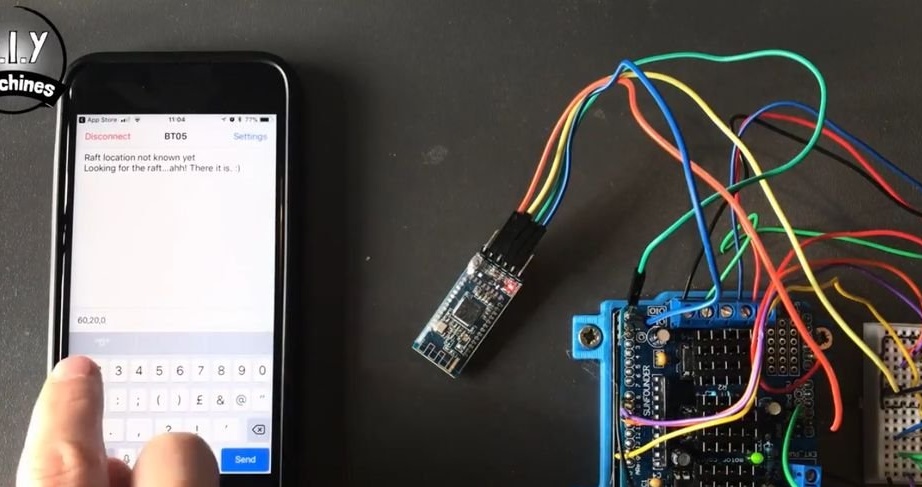
18. korak: bluetooth modul
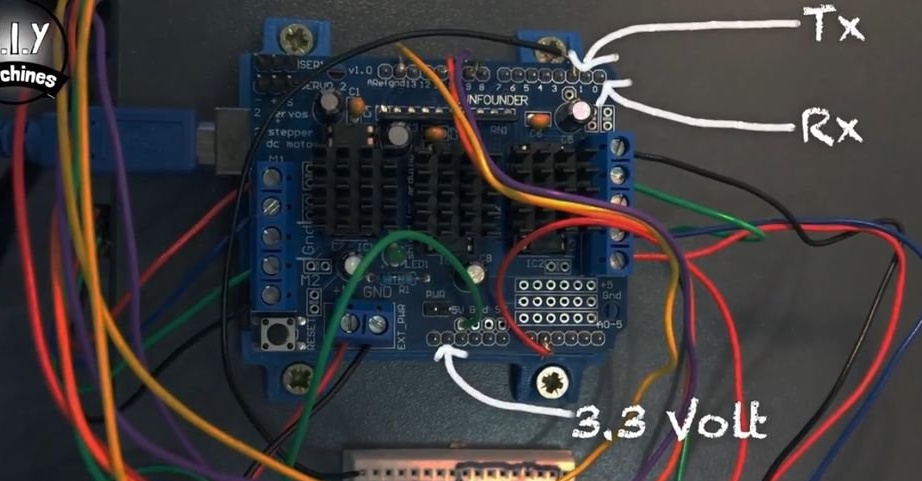
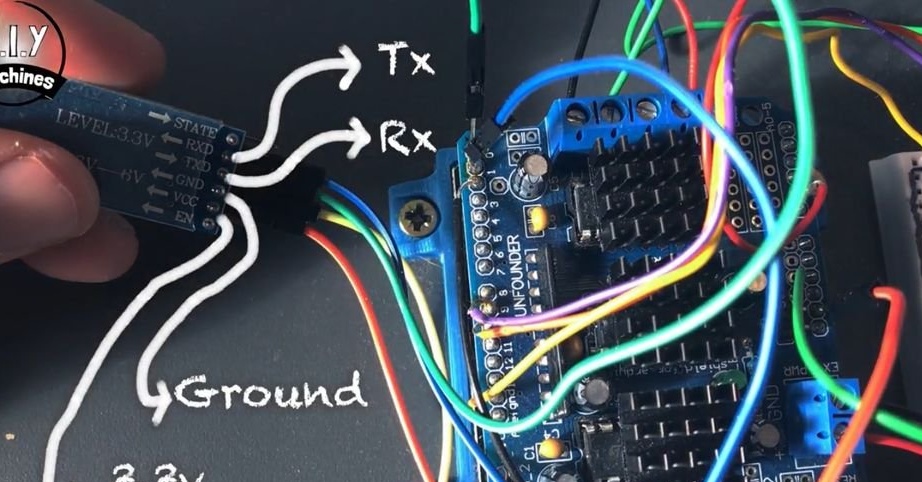
Za kontrolu barmena s gadgeta, majstor je instalirao Bluetooth modul. Modul se povezuje na sljedeći način.
HM10 -> Arduino štit
RXD ------> TX
TXD -------> RX
GND ------> zemlja
VCC ------> 3.3V

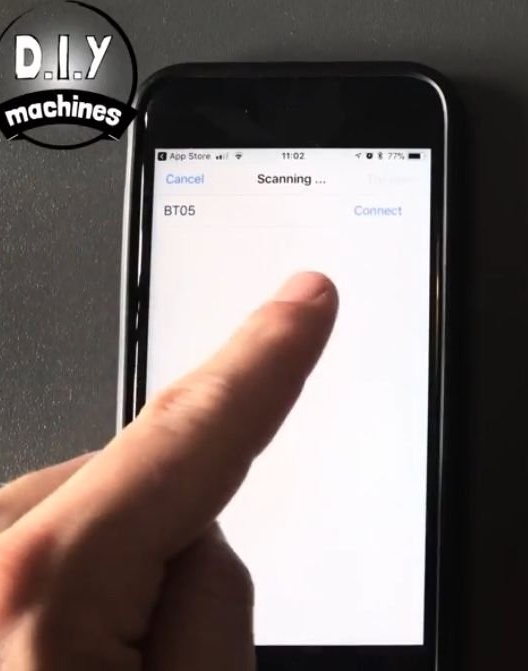
Majstor ima pametni telefon koji radi na iOS-u. Za ovaj sustav preuzima "hm10 bluetooth serijski lite" iz trgovine aplikacija. Tada uspostavlja veze i ulazi u postavke.

Sve je spremno, a za potpunije informacije nekoliko videa.