

Želite se posvađati između paukova robota? Zatim pažljivo proučite ovaj članak, u njemu će vam Učitelj reći kako napraviti takvog pauka. A za jasnoću njegovog rada pogledajmo video.
Alati i materijali:
Za pauka
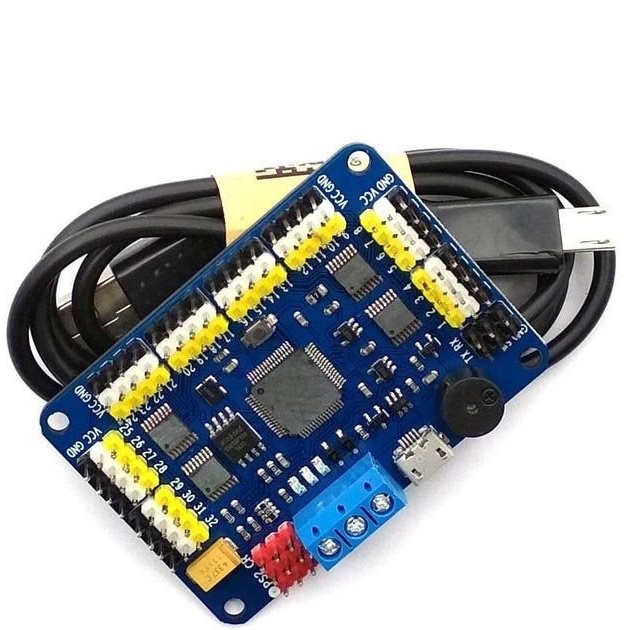
32-kanalni servo kontroler;
-Wemos D1 Mini kontroler;
- Servo pogoni MG90S - 18 kom;
-Ubec 6A 5V regulator;
- pretvarač jednosmernog napona;
- skakači;
-Akkumulyator;
Za kulu
-Dva motora;
-Snažni modul;
- Spuštanje pretvarača;
-Servoprivod;
-3D pisač;
-Polje za ljepljenje;
-Kley;
- odvijač;
-Krepezh;
- dvostrana traka;
-Kusachki;
-Nozh;
-Nadfili;
-Plastične kuglice;
-Pribor za lemljenje;






Prvi korak: ispis dijelova
Prvo morate ispisati detalje tijela i nogu na 3D pisaču. Na ovom možete preuzeti datoteke za ispis veza.


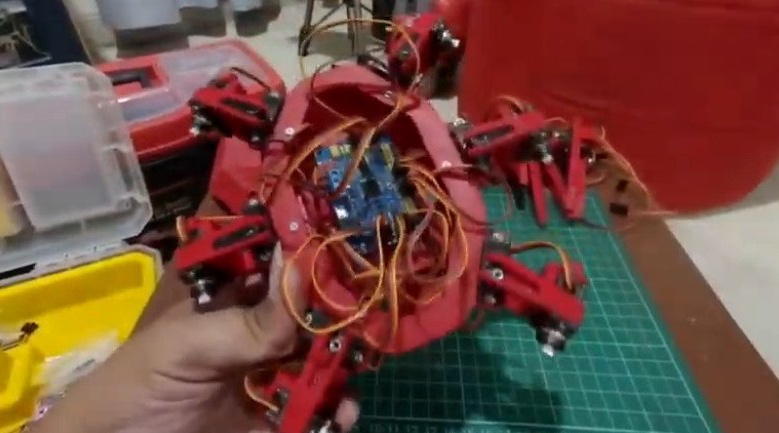
Drugi korak: Izgradite
Sada trebate sakupljati robopauk.
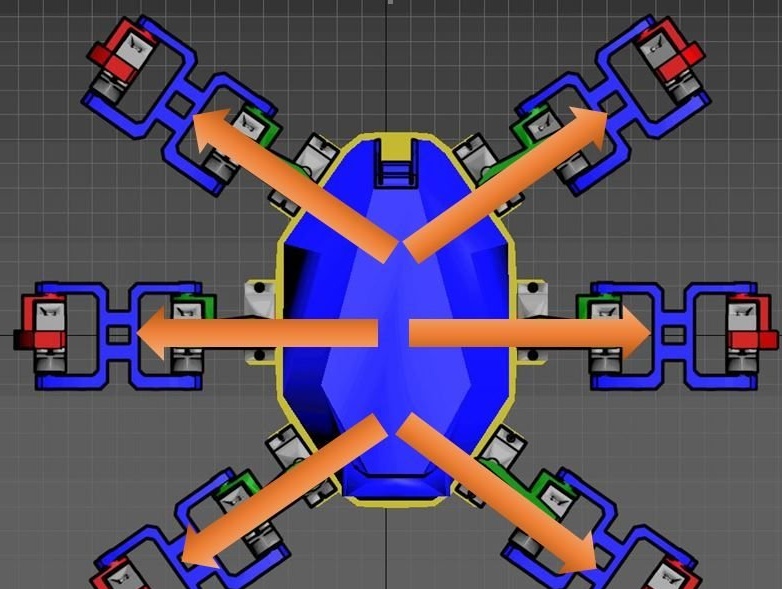
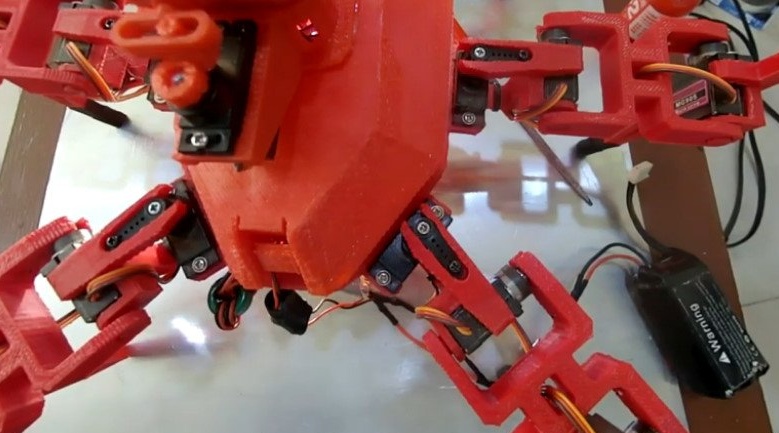
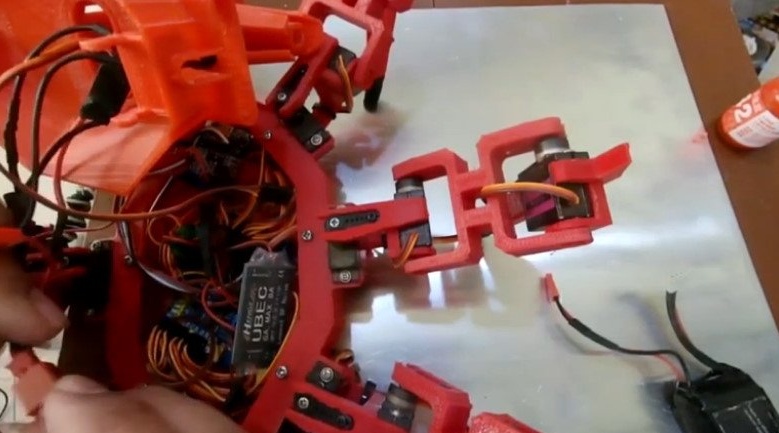
Majstor instalira servo na zglobove paukove noge. Ukupno, robot ima šest nogu i tri servousa na svakoj nozi.








Instalira servo na platformu šasije.




Prve zglobove noge pričvršćuje na servo platforme.




Žice su uvučene u tehnološke rupe i povezane s kontrolerom.





Instalira ubode.


Uspostavlja druge zglobove nogu. Spaja žice sa servo-uređaja na regulator.






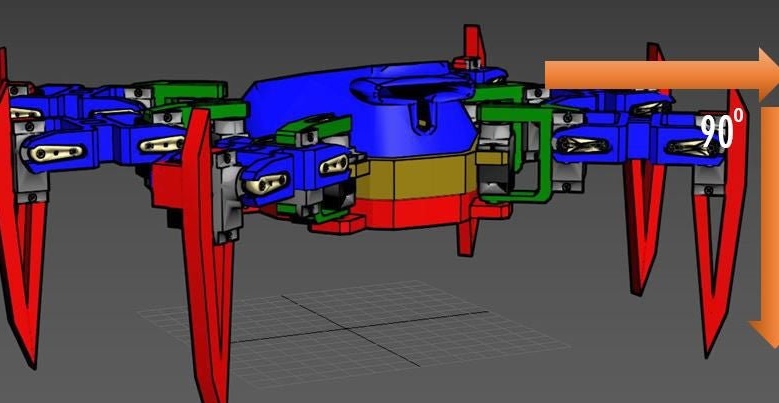
Ugrađuje treći spoj. Ovim zglobom pauk će se naslanjati na površinu pri kretanju.


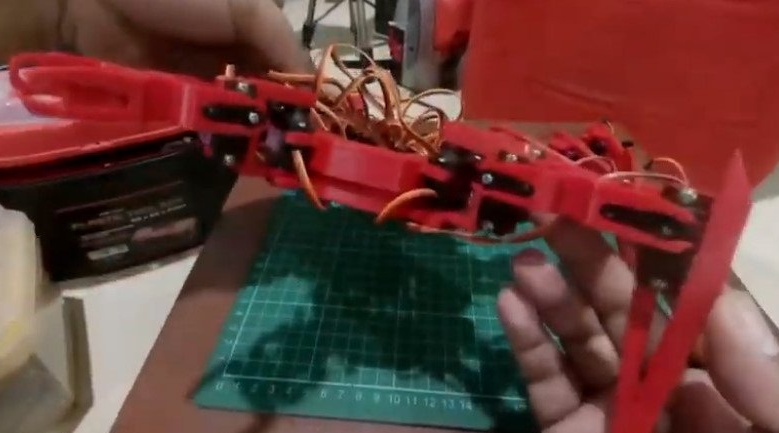

Povezuje i provjerava rad svakog servo pogona.



Ako sve normalno pričvršćuje žice kravate, instalira bateriju i zatvara poklopac.



Postupak izrade možete vidjeti u videu.
Treći korak: otprilike elektronika
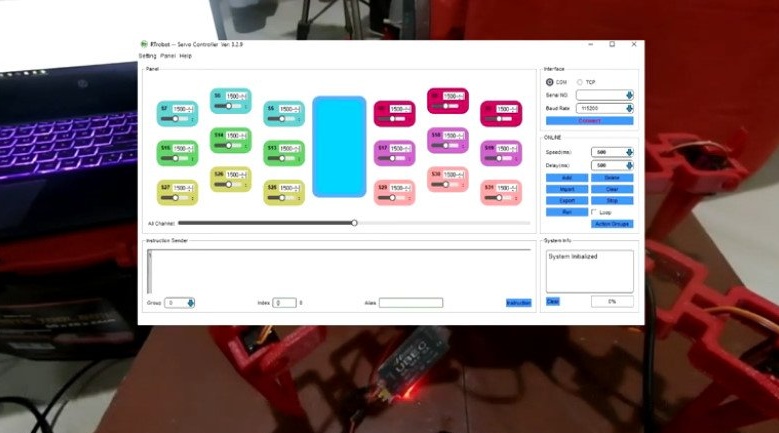
Čarobnjak je koristio RTrobot servo kontroler za kontrolu pokreta. Program za upravljanje može se preuzeti ovdje ili ovdje.
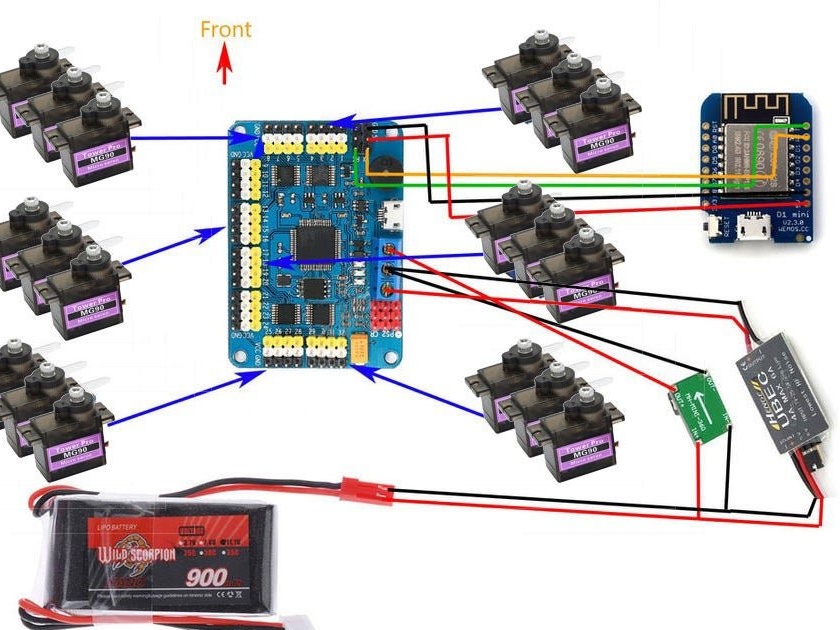
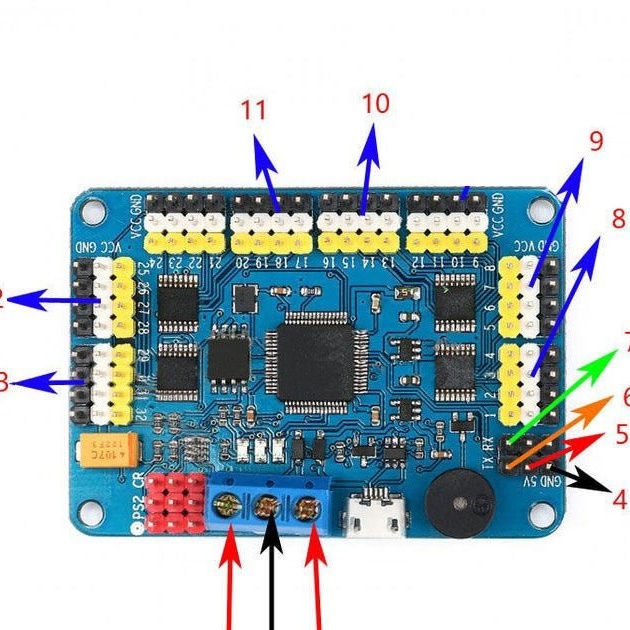
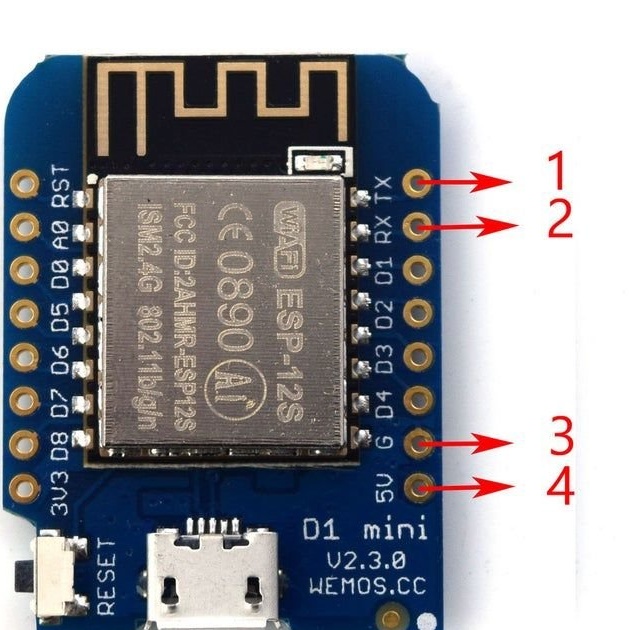
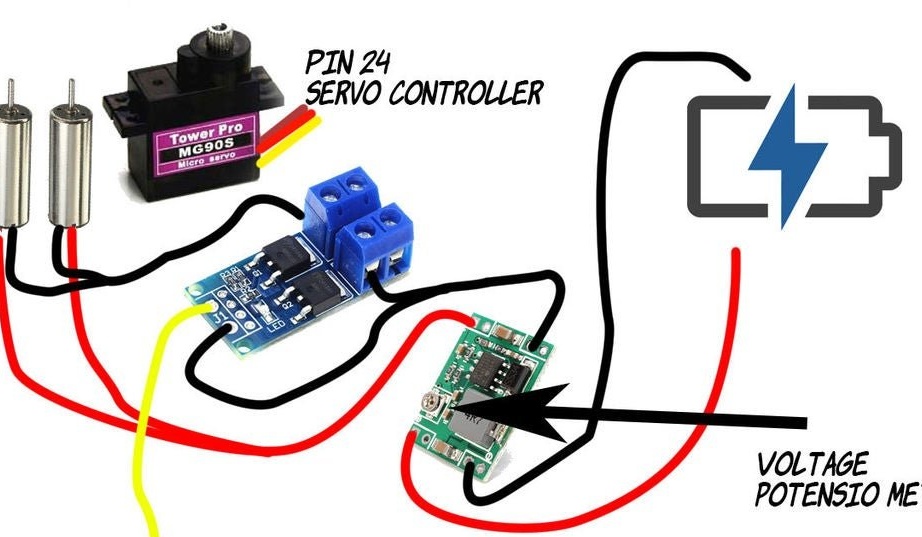
Sve je povezano kako slijedi:
1. 5V (+) UBEC izlaz
2. Zemlja s UBEC-a i pretvarač struje
3. 5 V napajanje (+) iz pretvarača
4. na Wemos D1 mini G pin
5. do Wemosa 5v
6. na Wemos D1 RX
7. Wemos TX
Servo pogoni su spojeni na iglice od 8 do 13.
Instalirajte kôd na NodeMCU. Možete ga preuzeti ovdje.
WeMos D1 mini je minimalna Wi-Fi kartica ESP8266.
Koristeći wemos D1 mini kao WIFI pristupnu točku, možete poslati serijsku naredbu na servo kontroler. Sve što je potrebno je samo da bljesnete nodeMCU ploču s kodom, a pametni telefon možete povezati s nodeMCU AP. Zatim pomoću web preglednika idite na http://192.168.4.1.
Važno je.
kada uključite servo, svi će se servo prijeći u izvorni / standardni položaj
instalirajte servo uređaje što je točnije, kao što je prikazano na slici iznad ili u videu
podesite položaj zglobova, isključite i ponovo uključite uređaj kako biste bili sigurni da su sve noge u ispravnom položaju
ako se zglobovi stežu, trljajte, prilagodite položaj.
Četvrti korak: Kula
Sada se okrećemo montaži kule.
Prvo, detalji kule trebaju biti ispisani. Ovdje možete preuzeti datoteke veza.
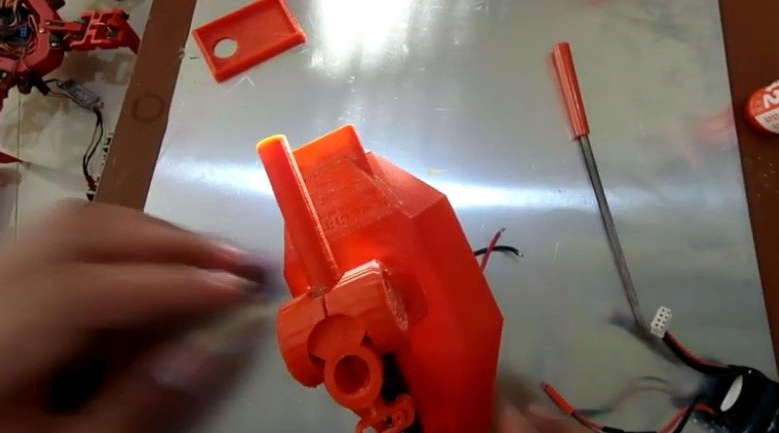
Tada gospodar započne sagraditi toranj. Niži krug za okretanje kule i spajanje električnih dijelova.
Instalira servo na toranj.







Dvostrana traka zalijepi se na valjke.


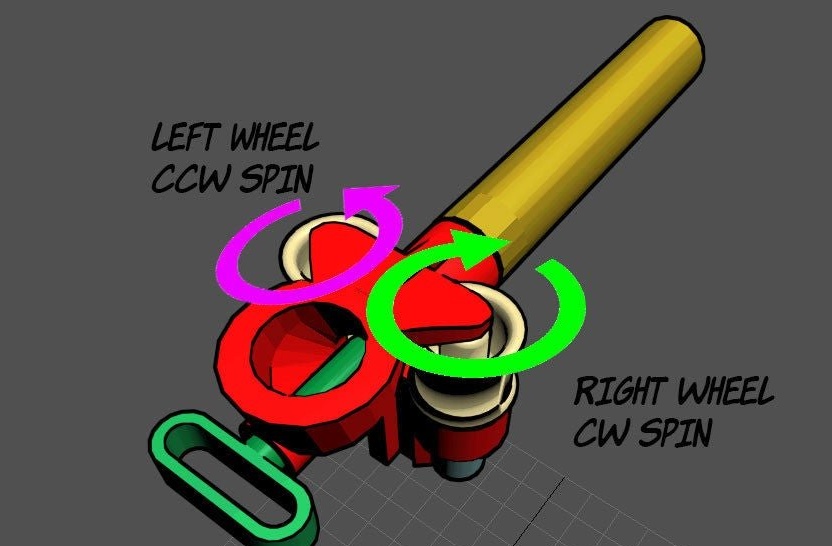
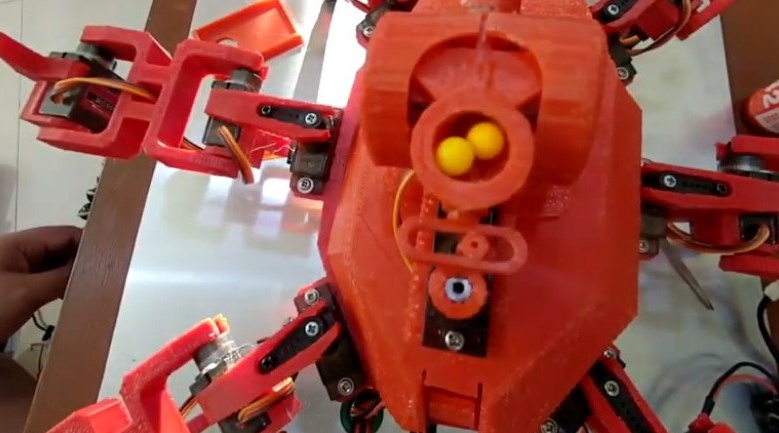
Skuplja pištolj. Instalira motore u držač. Instalira valjke na osovine motora.







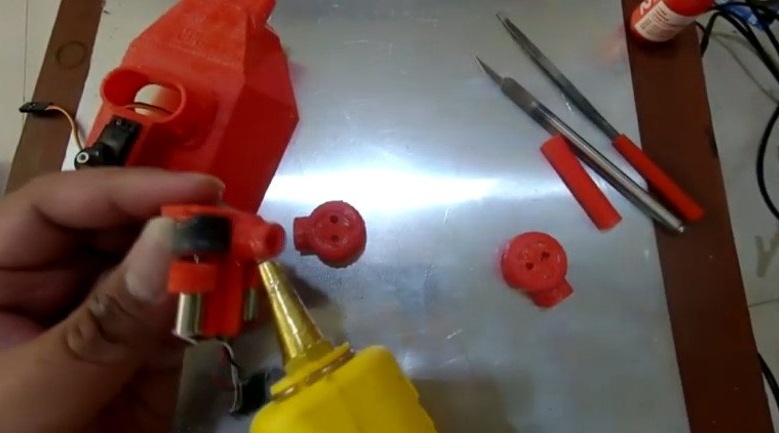
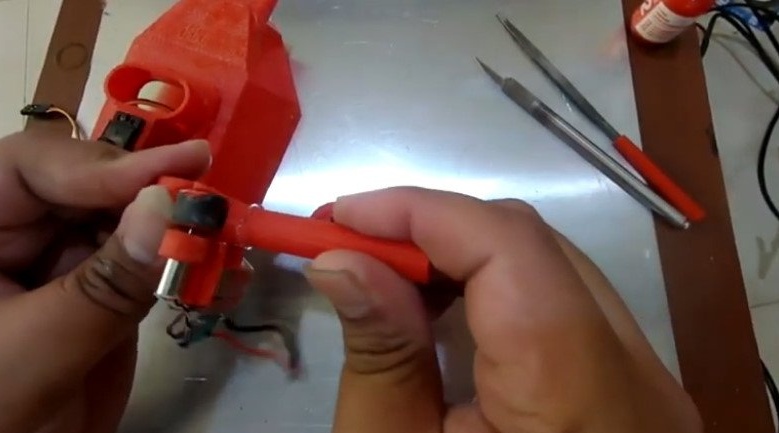

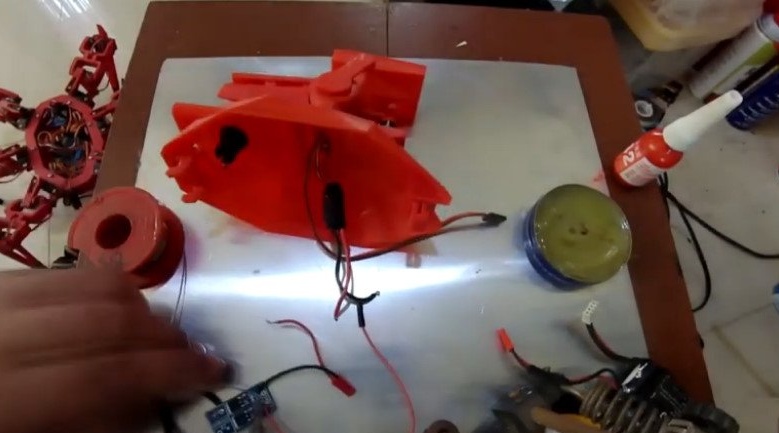
Povezuje žice i skuplja toranj.




Učitava granate i provjerava rad pištolja. Mehanizam se može podesiti pomicanjem držača na servo vratilu.


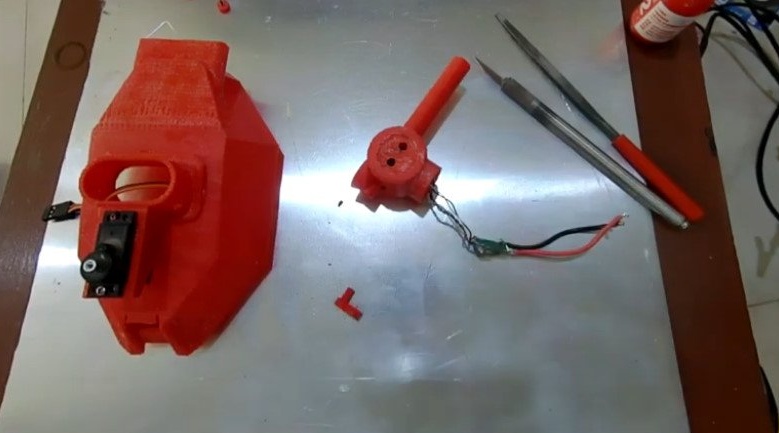
Obavlja završno spajanje, montažu i pregled.




Video s montažom kule možete vidjeti dolje.
Sve je spremno. Skupite još jedan takav robopauk i možete dogovoriti svađe.
