
Nedavno sam izgradio desetine robota, uglavnom inspiriranih čudima BEAM robotike. Ako niste upoznati s ovom tehnologijom, BEAM je posebna metoda za izradu robota s naglaskom B - biologija, E - elektronika (elektronika), estetika (estetika) i M - mehanika (mehanika). Ovo je kratica BEAM. Ono što razdvaja ovu tehnologiju od drugih pristupa je upotreba samo radijacijske energije za prehranu (uglavnom solarna energija), zbrinjavanje raznih materijala (ponovna upotreba) i minimalizam. Iako sam prihvatio te principe, svoje roboti nisu bili baš u duhu BEAM (napajali su ih baterijom).
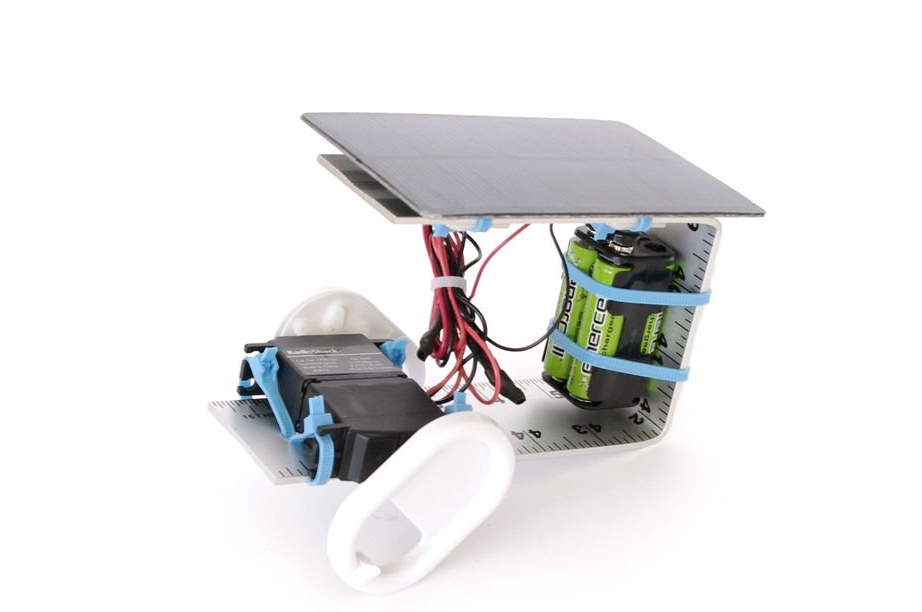
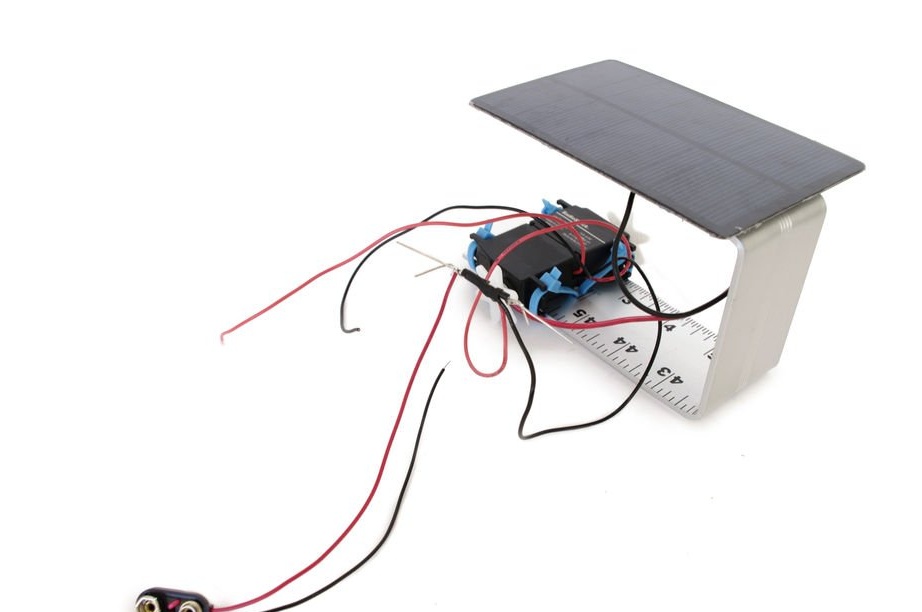
Budući da me BEAM robotika ozbiljno inspirirala, želio sam napraviti robota na solarni pogon. Ali umjesto da samo napravim BEAM robota, odlučio sam integrirati solarnu ploču u robota svog uobičajenog stila. Umjesto da ga u potpunosti napaja sunce, odlučio sam ugraditi punjive baterije. Odnosno, moj robot može se napajati ili iz baterije ili iz solarne ploče, ovisno o tome koji je izvor energije trenutno snažniji. Solarna ploča također puni baterije kada sunčeva svjetlost udari. To omogućava robotu da se kreće i po svjetlu i u sjeni.
Mislim da ovaj pristup uspješno kombinira dva stila i ovo je zanimljiv eksperiment u konstrukciji robota.
1. korak: Materijali
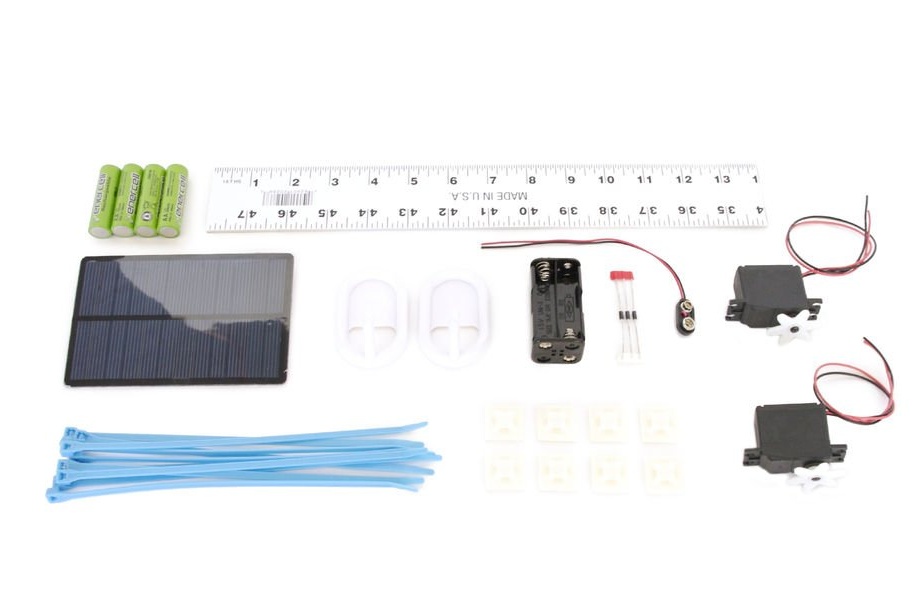
Trebat će vam:
(x1) Solarna ploča
(x2) Standardni servomotori
(x3) Schottky Diodes 1N5817 - ekvivalent NTE578
(x1) 9V baterija
(x8) Punjive AA baterije
(x1) 8 x AA baterija
(x12) Podnožje za stezaljke
(x1) ravnalo (30 - 50 cm)
(x2) Zidne ljepljive kuke
(x1) Plastične stezaljke
(x1) Toplinski skupljajuće cijevi
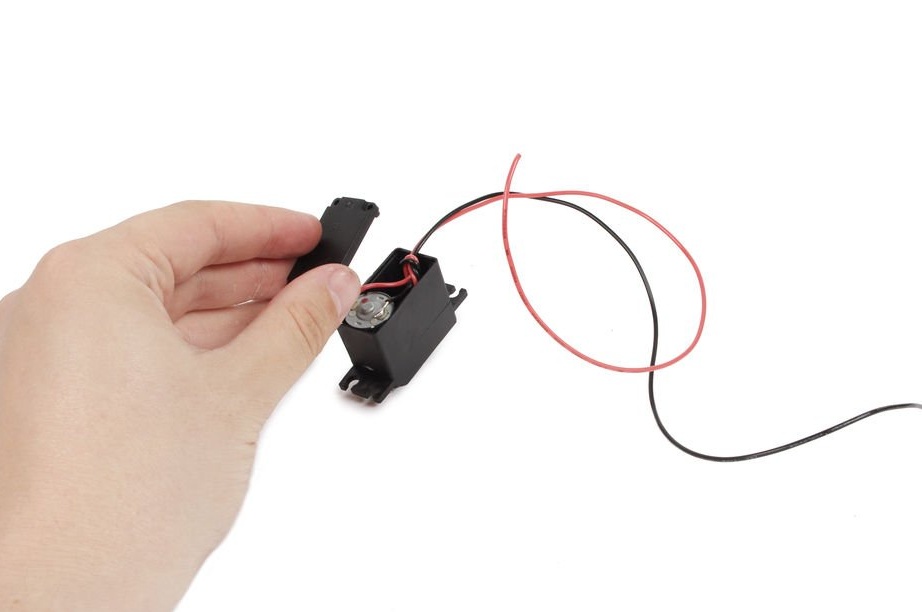
2. korak: Izmijenite servo

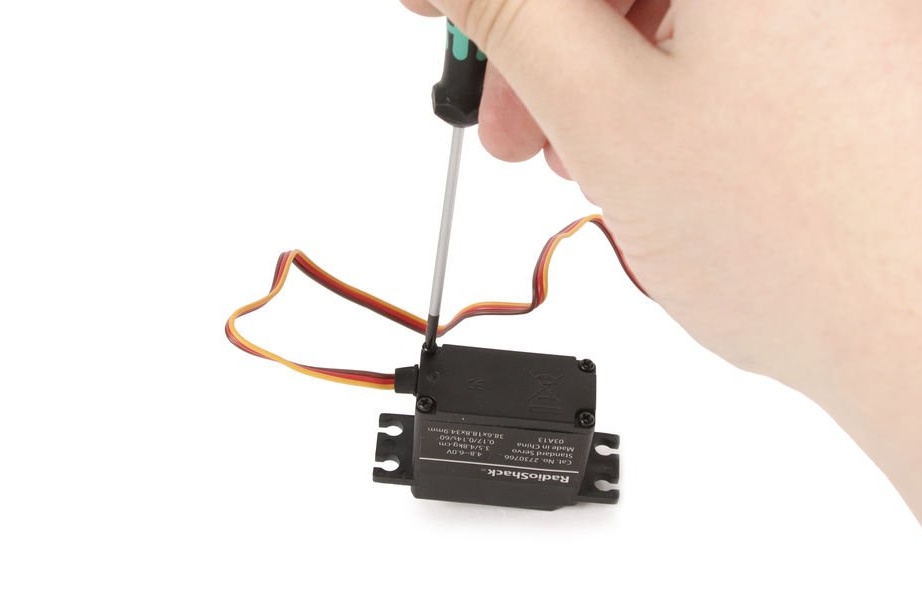
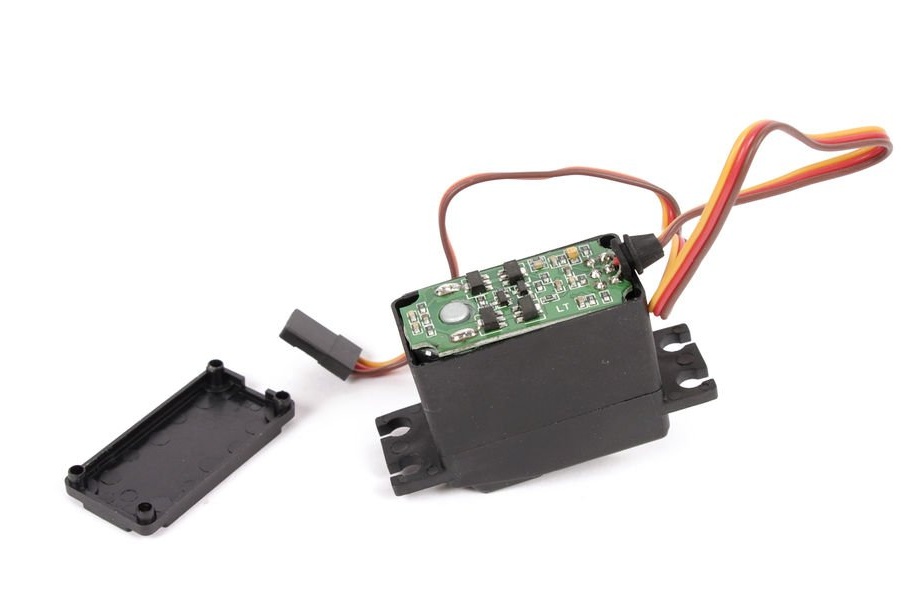
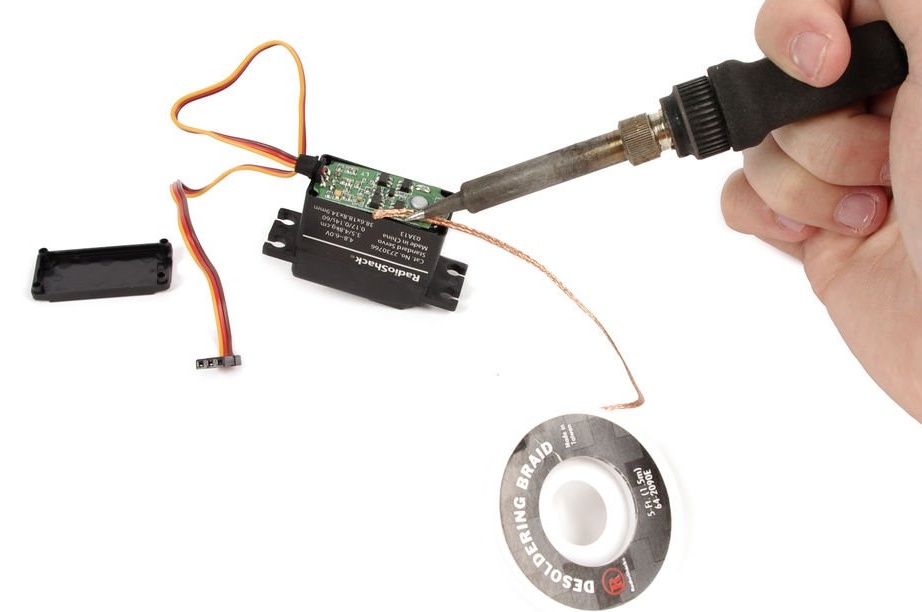
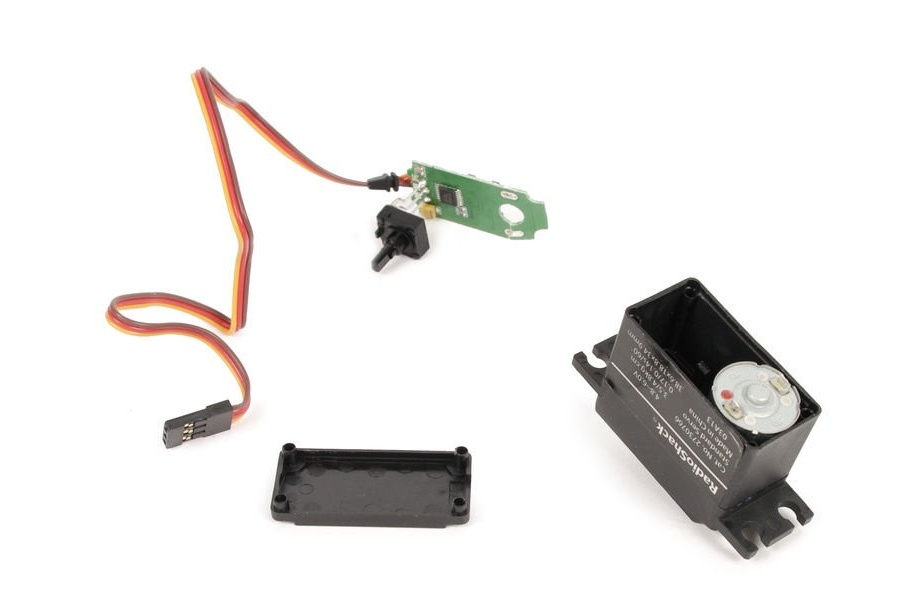




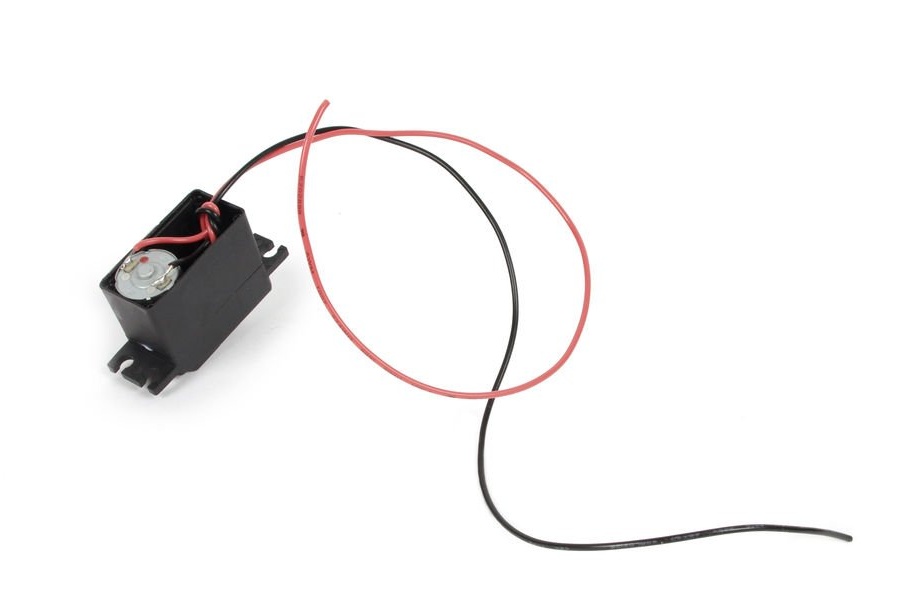

Otvorite kućište servo odvijte 4 vijka na donjoj ploči. Otkopčajte ploču iznutra i spojite crvenu i crnu ožičenje na svaki terminal pogona.
Otvorite pogon zupčanika i pronađite zupčanik s malim plastičnim poklopcem koji sprečava kontinuirano okretanje. Odvojite poklopac sa zupčanika.
3. korak: bušite
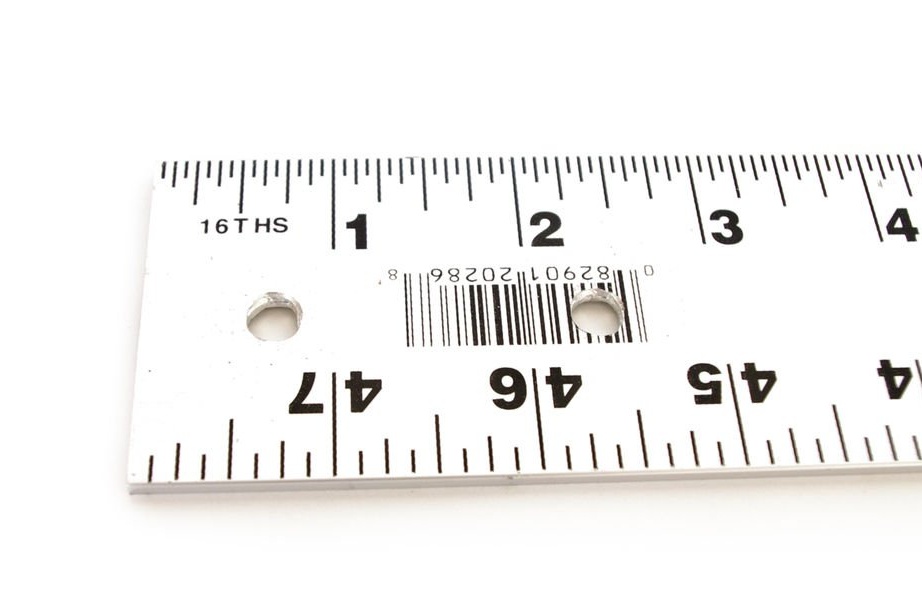


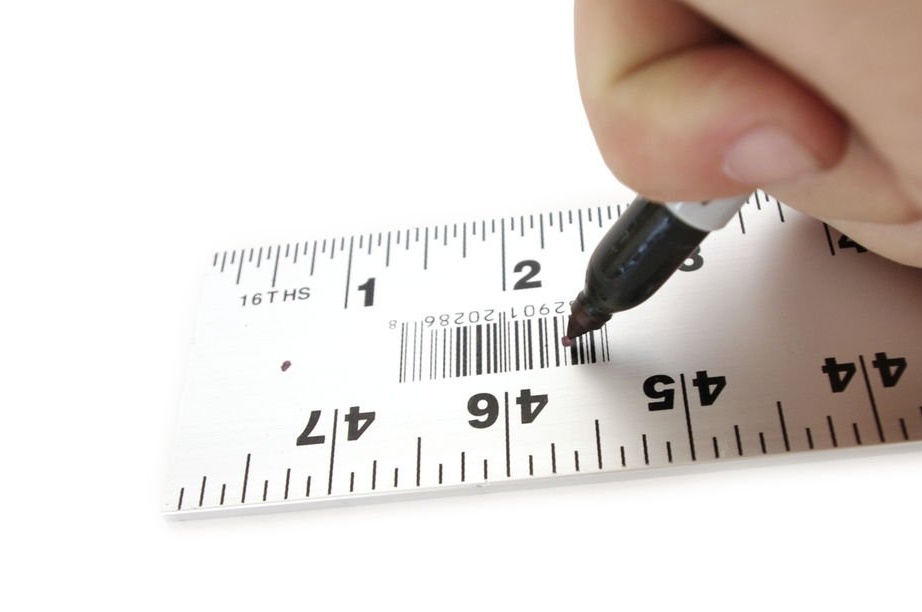
Izbušite rupu četvrtine inča (6,3 mm) u sredini ravnala, oko 15 mm od kratkog ruba. Izbušite drugu rupu otprilike 60 mm od istog ruba.
4. korak: Savijte

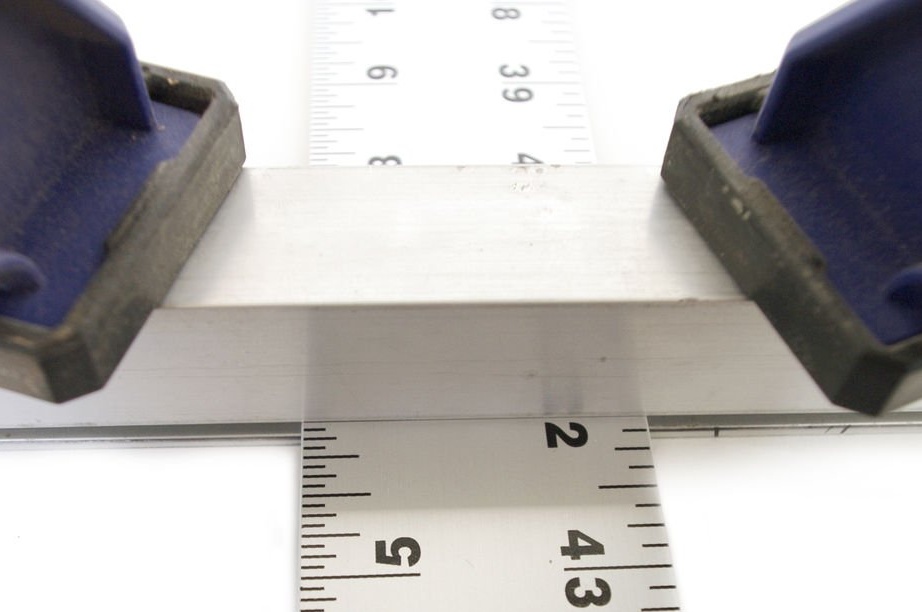
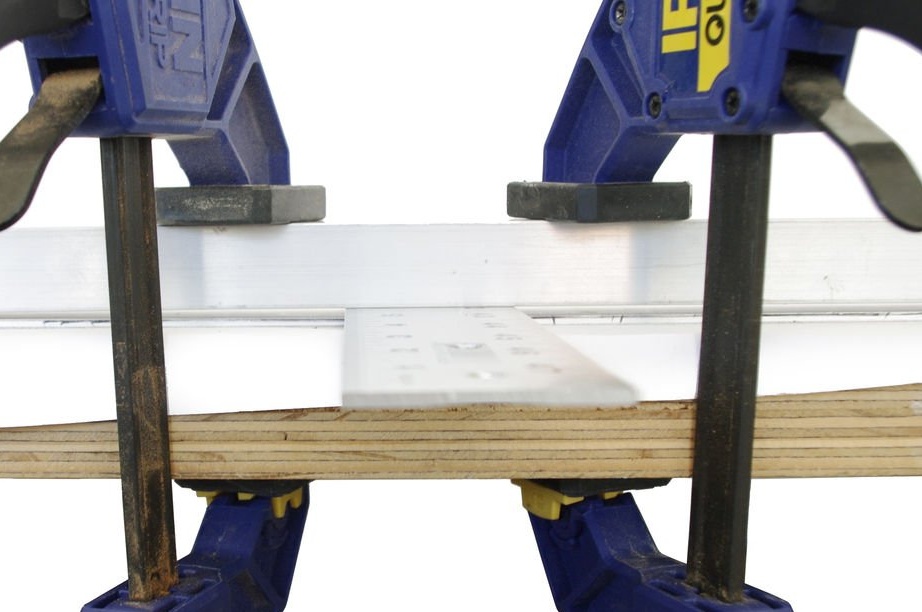

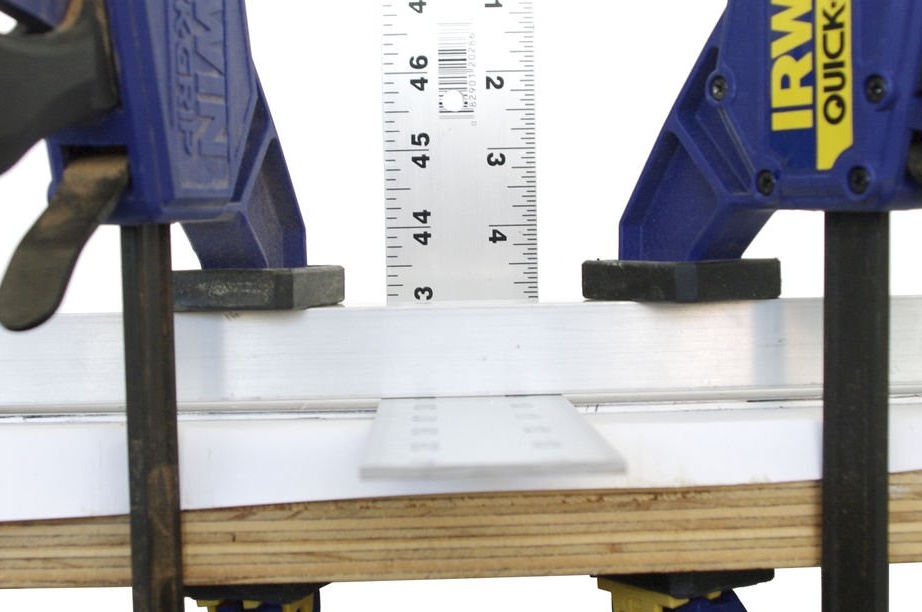

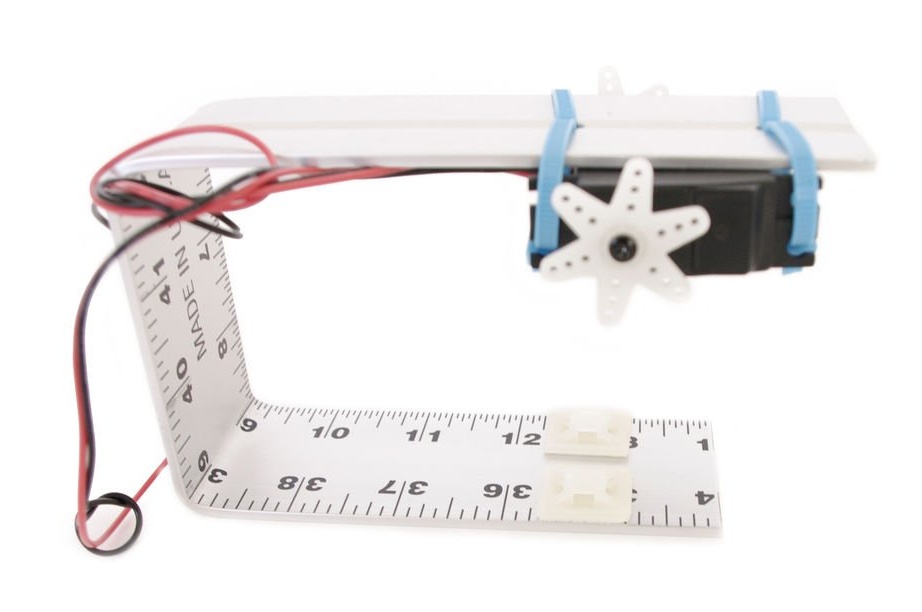
Upotrijebite viseću ili dvije metalne ploče pričvršćene na rub stola, savijte ravnalo pod kutom od 90 stupnjeva na udaljenosti od 15 cm od ruba u kojem su izbušene rupe.
Napravite isti zavoj pod kutom od 90 stupnjeva na udaljenosti od 15 cm od drugog ruba. Dobit ćete lik u obliku slova P.
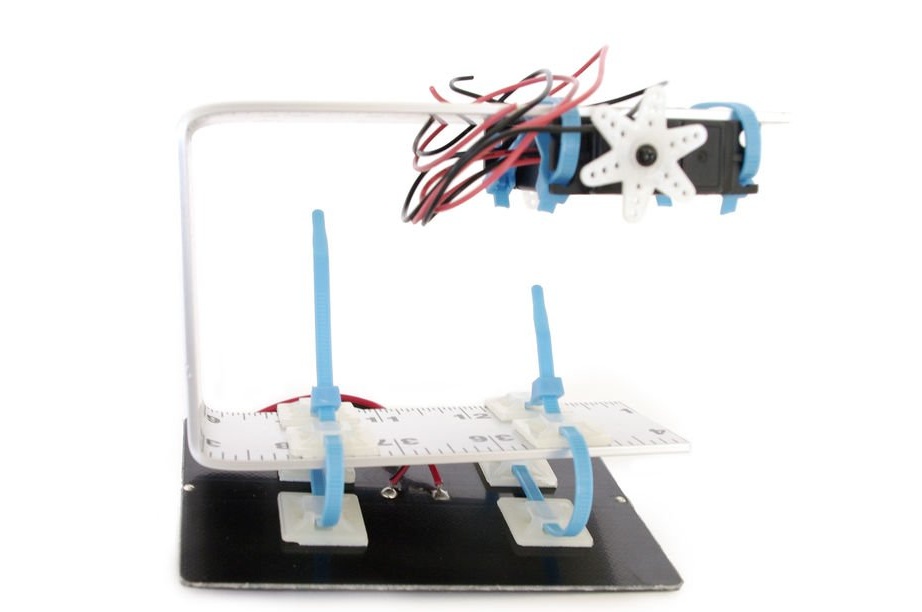
Korak 5: Spajanje
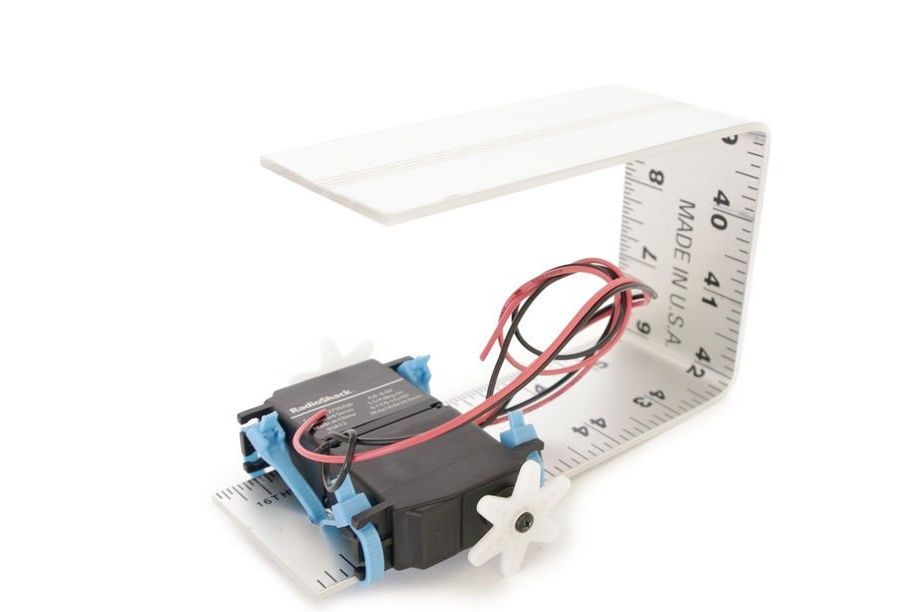

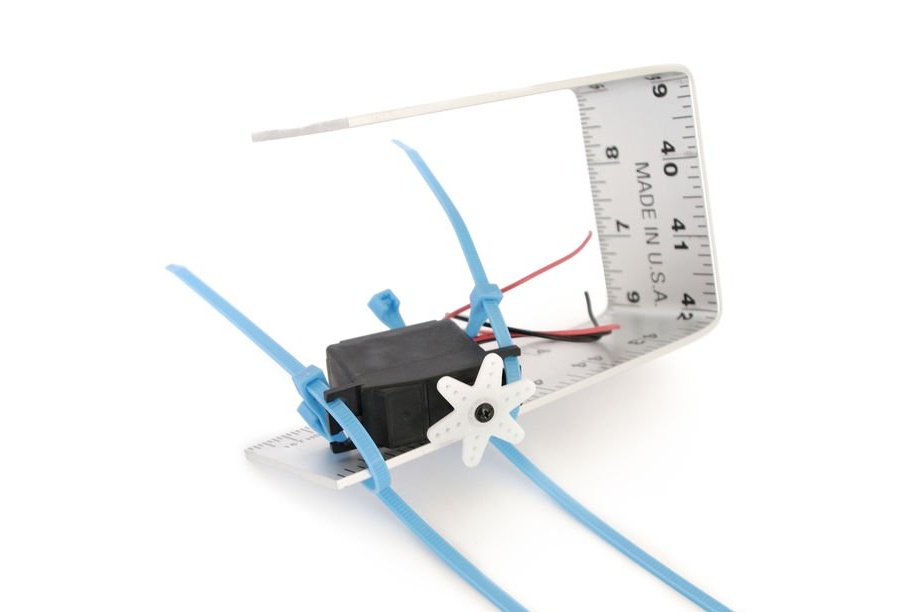
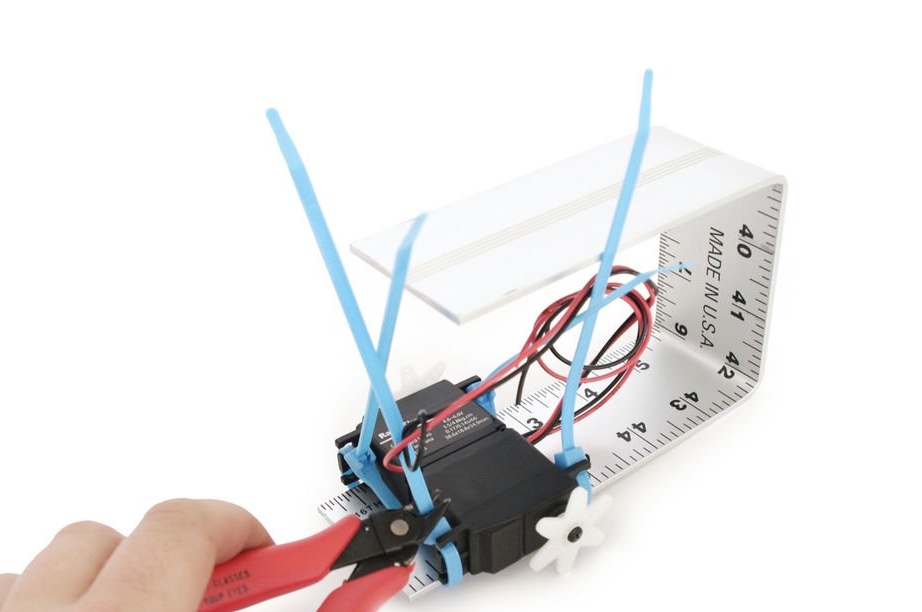
Potrebno je popraviti servovode na liniji plastičnim stezaljkama, kroz izbušene rupe. Servomotori moraju sjediti okrenut leđima jedan prema drugom.
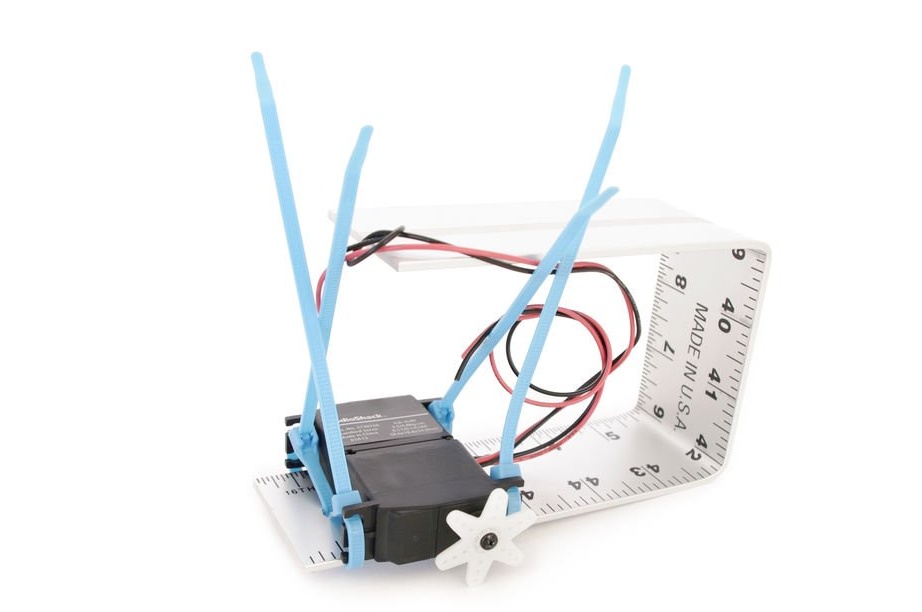
Korak 6: Baza za stezaljke
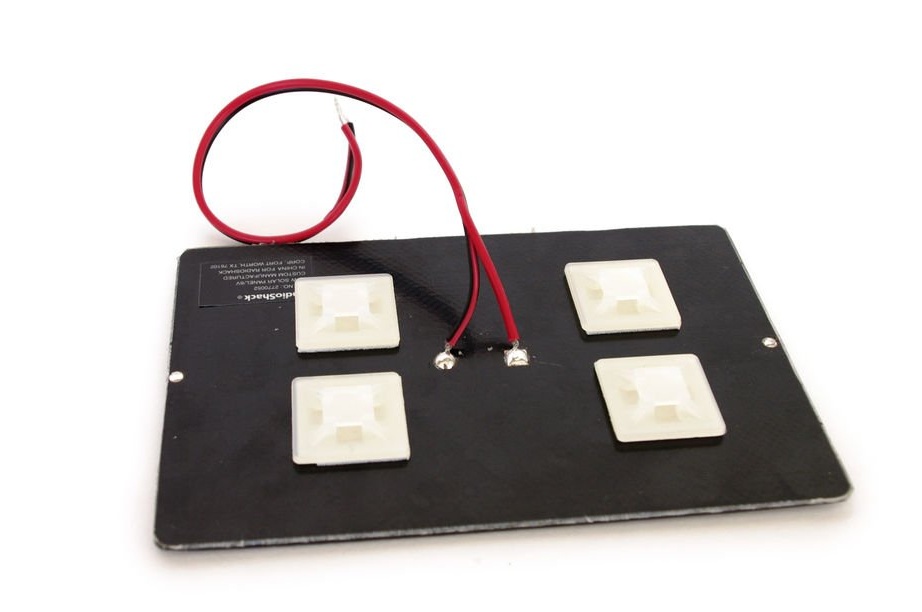

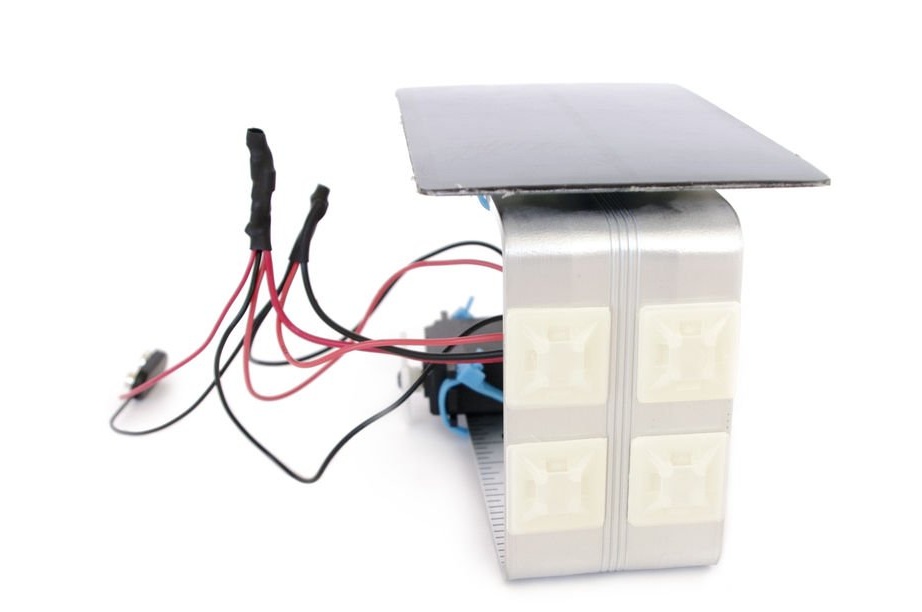
Na stražnju stranu solarne ploče stavite dva para stezaljki jedan pored drugog. Važno je da se kanali svakog para nalaze u istoj liniji.
Korak 7: Više razloga
Pričvrstite još dvije baze s unutarnje strane U-trake, na stranu nasuprot servoslojevima.
Korak 8: Spajanje
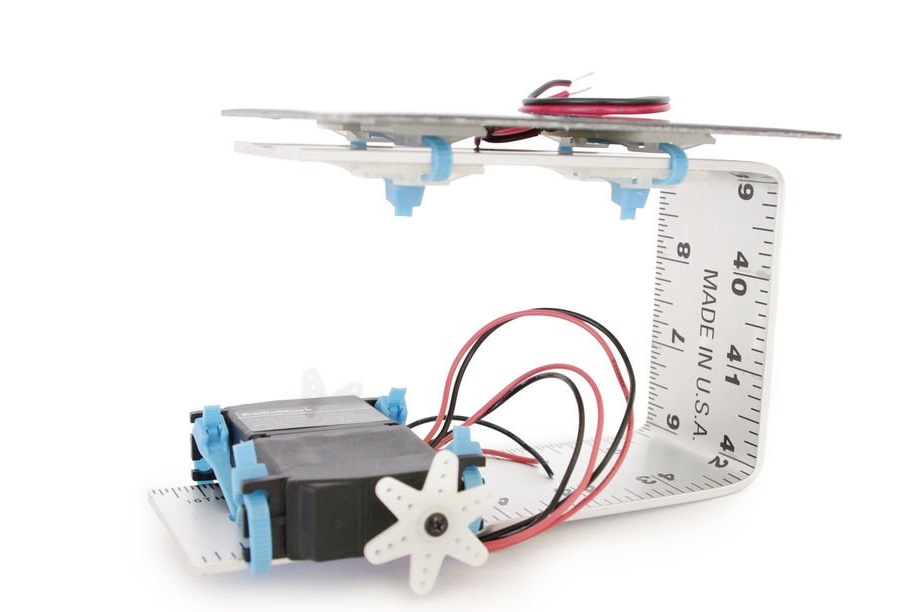
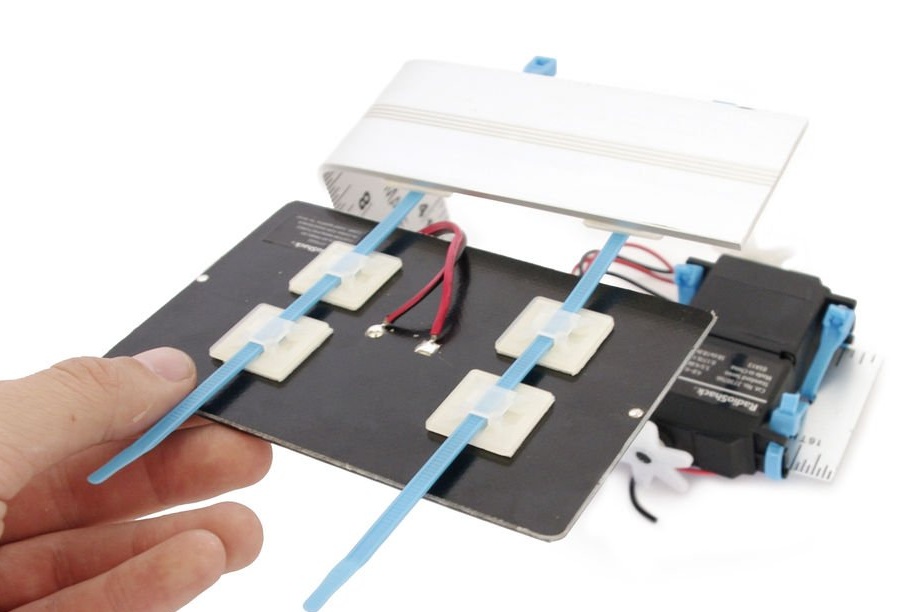
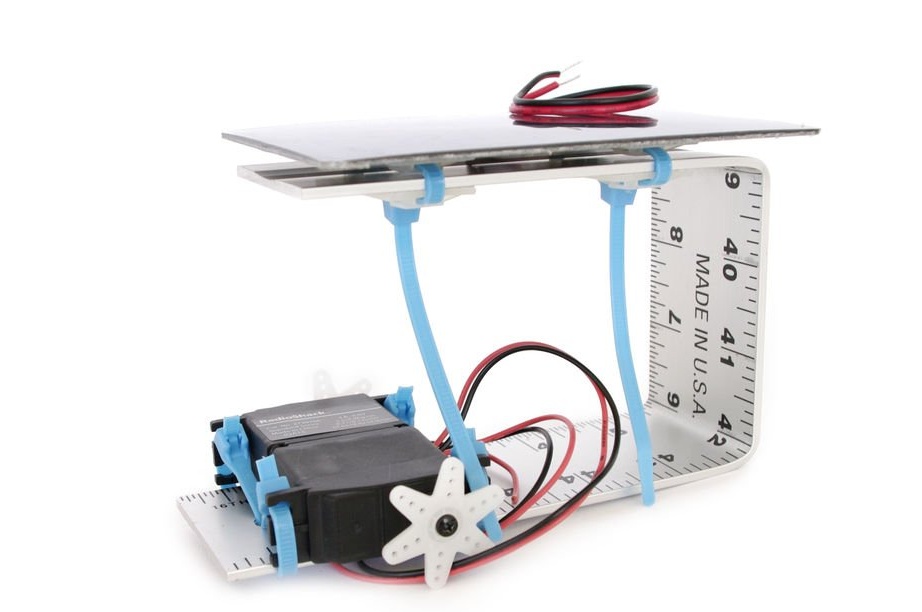
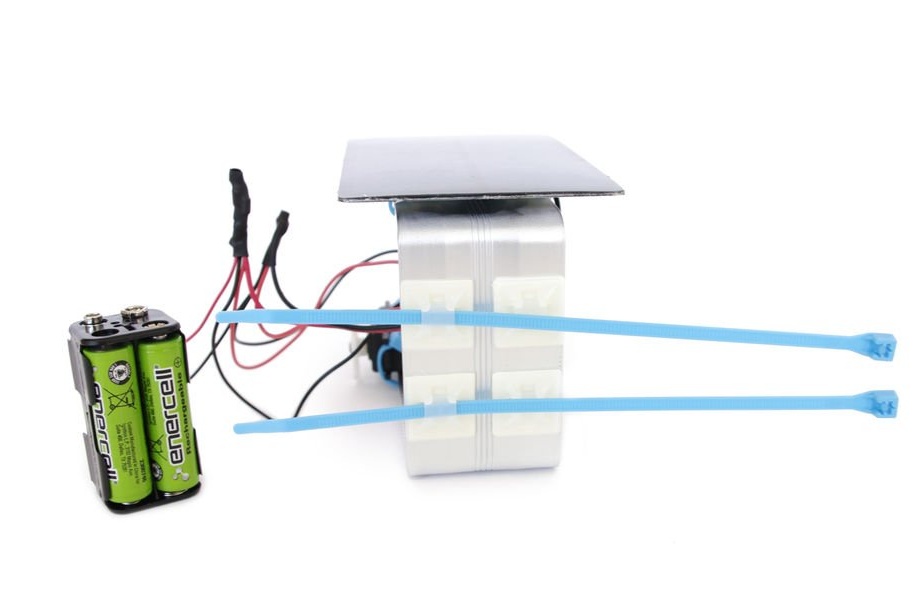
Pričvrstite solarnu ploču stezaljkama kroz fiksne baze.
Korak 9: Umetnite baterije


Umetnite baterije u bateriju.
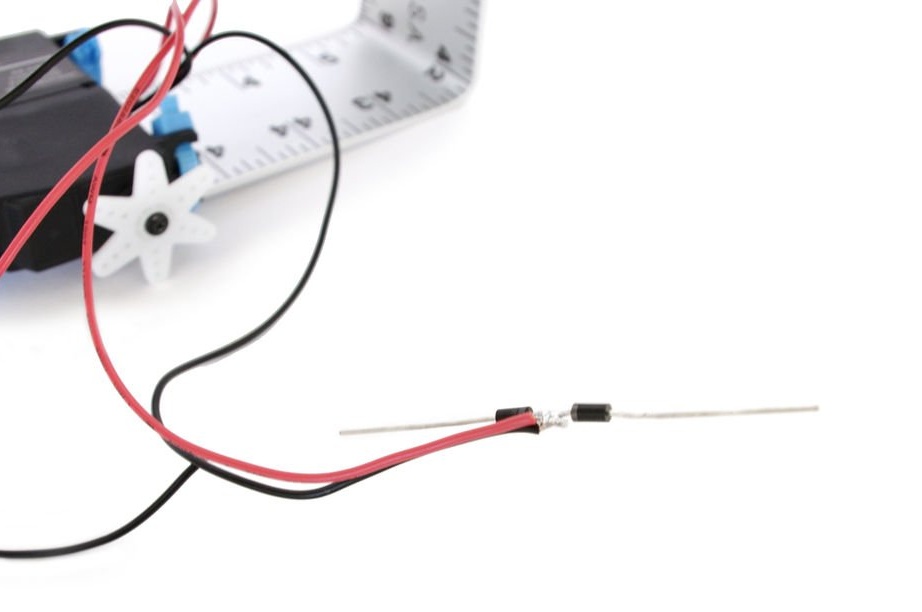
Korak 10: Diode

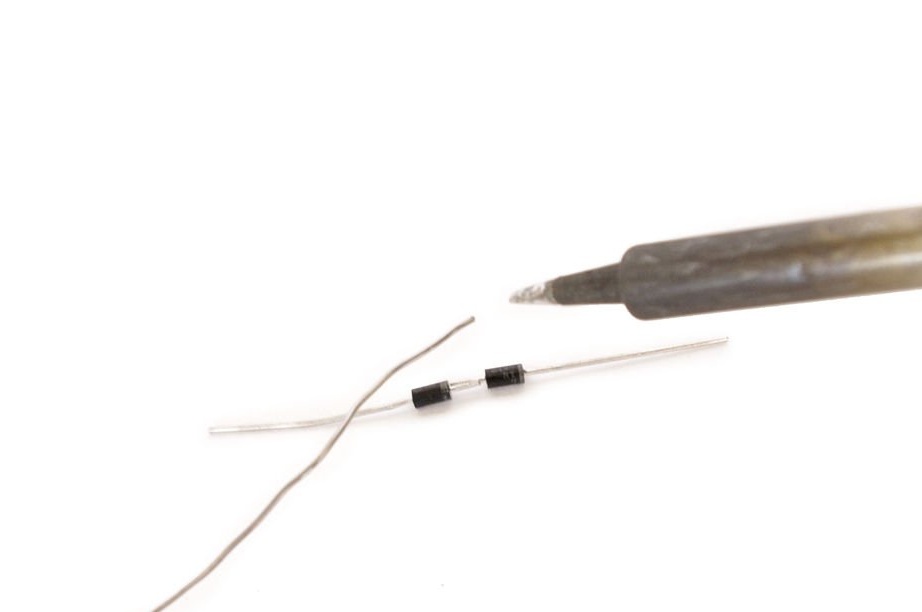
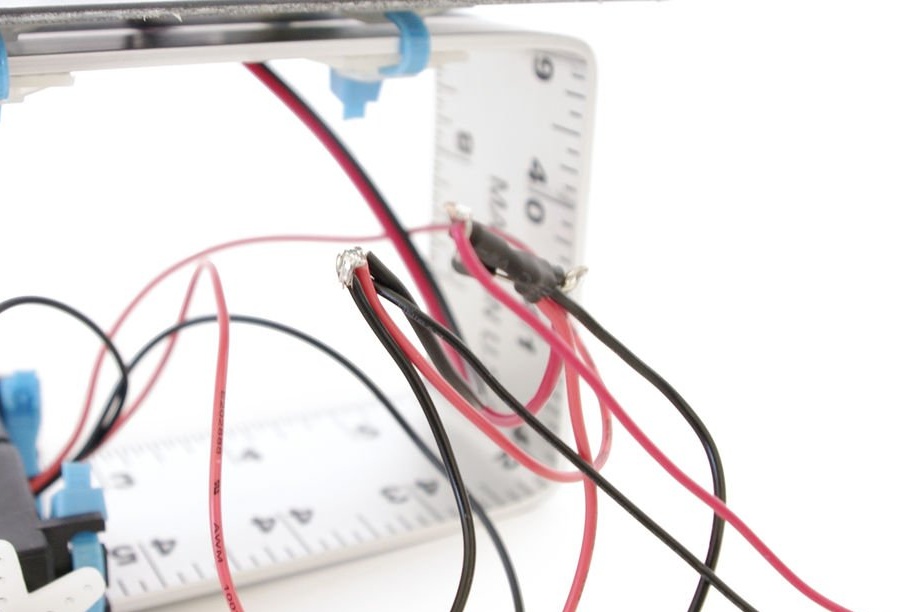
Spajajte dvije diode zajedno s katodama (strana dioda sa stazom).
Korak 11: Sastavljanje lanca
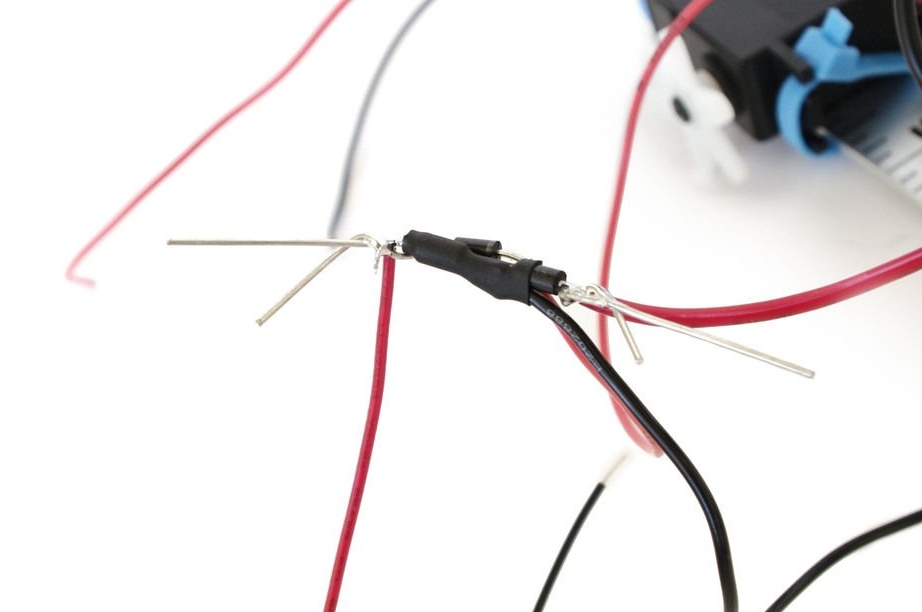
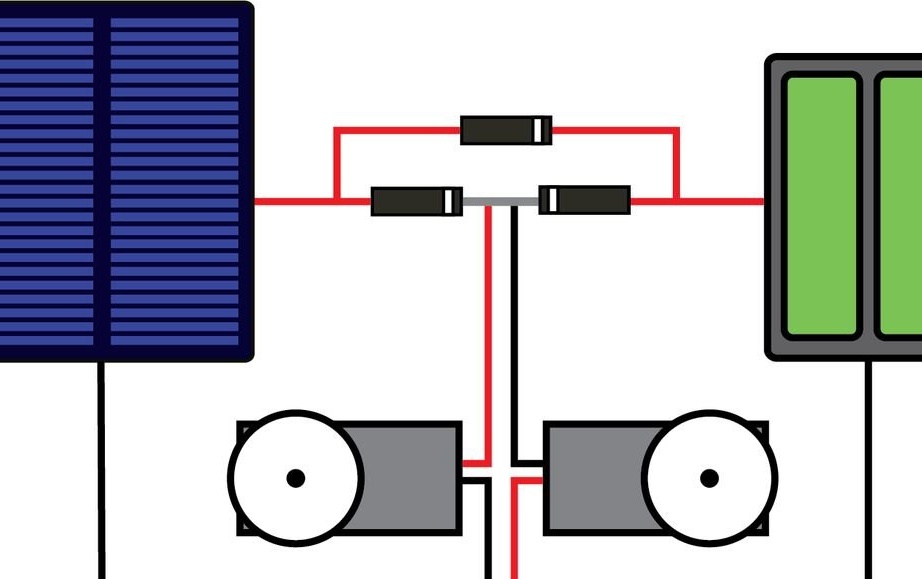
Krug za ovaj robot zasnovan je na jednostavnom krugu solarnog punjenja Davida Cooka. Krug sadrži dvije Schottky-ove diode povezane na katodu-katodu, jednu diodu spojenu na solarnu ploču i jednu od baterija. Ova konfiguracija omogućuje vam napajanje i baterijama i solarnom pločom, ovisno o uvjetima.
Budući da su baterije punjive, treća Schottky-ova dioda spojena je izravno sa solarne ploče na odjeljak za baterije kako bi se baterije napunile od sunca.
Da biste sve to povezali, crvenu žicu spojite s jednog servo-servisa, a crnu žicu s druge na središnju točku katodne veze.
Zatim spojite crvenu žicu s terminala akumulatora na anodu jedne od Schottkyjevih dioda. Crvenu žicu sa solarnog panela povežite s anodom na drugoj diodi.
Sada lemite anodu treće diode na crvenu žicu koja je spojena na solarnu ploču, a katodu na crvenu žicu s terminala akumulatora.
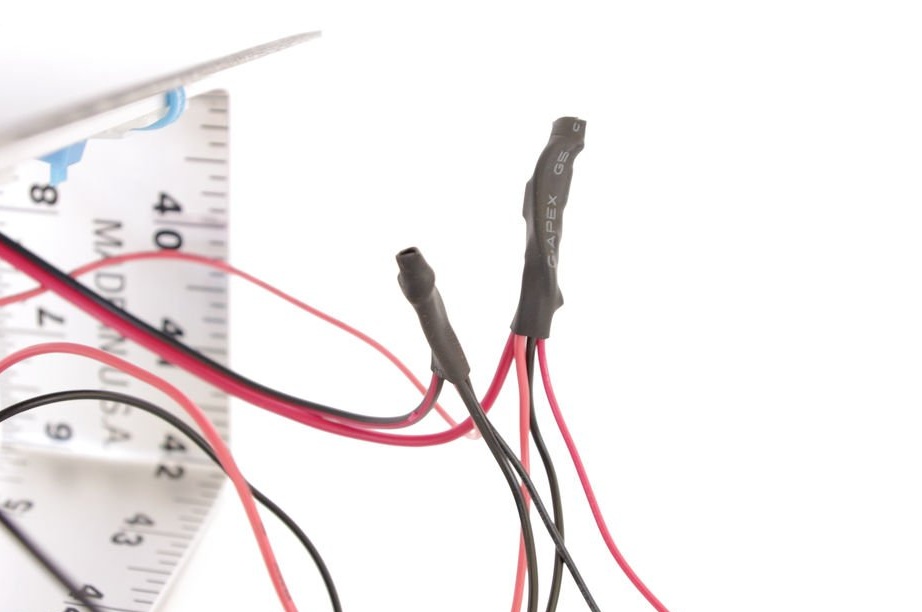
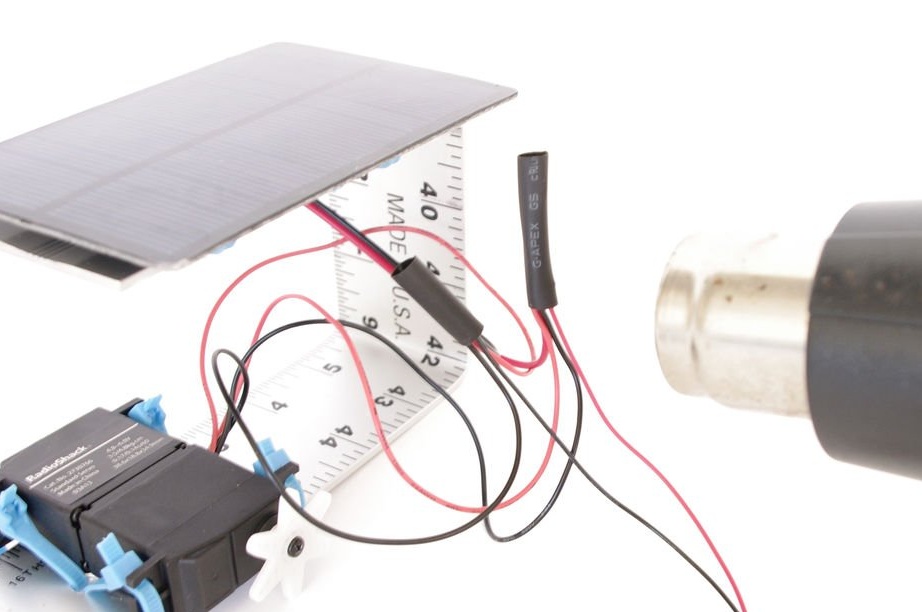
Omotajte sve žice toplinskom steznom cijevi da biste zaštitili krug od kratkog spoja.
12. korak: Još nekoliko žica
Spojite sve crne žice i preostale besplatne crvene žice s servo uređaja.
Nabavite dva lemljena spoja; jedan za snagu i jedan za uzemljenje. Oba ovog zgloba zamotajte cijevi od topline i električnom vrpcom.
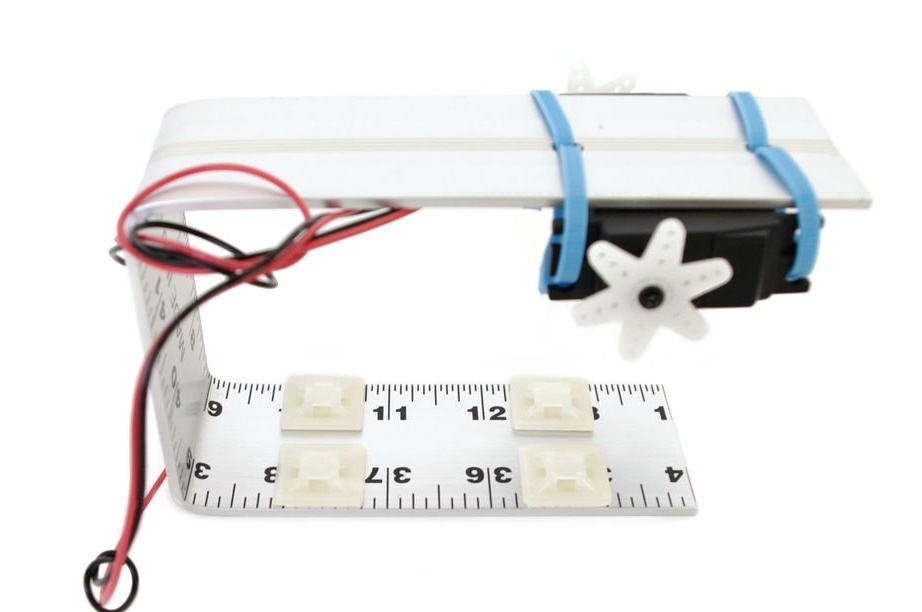
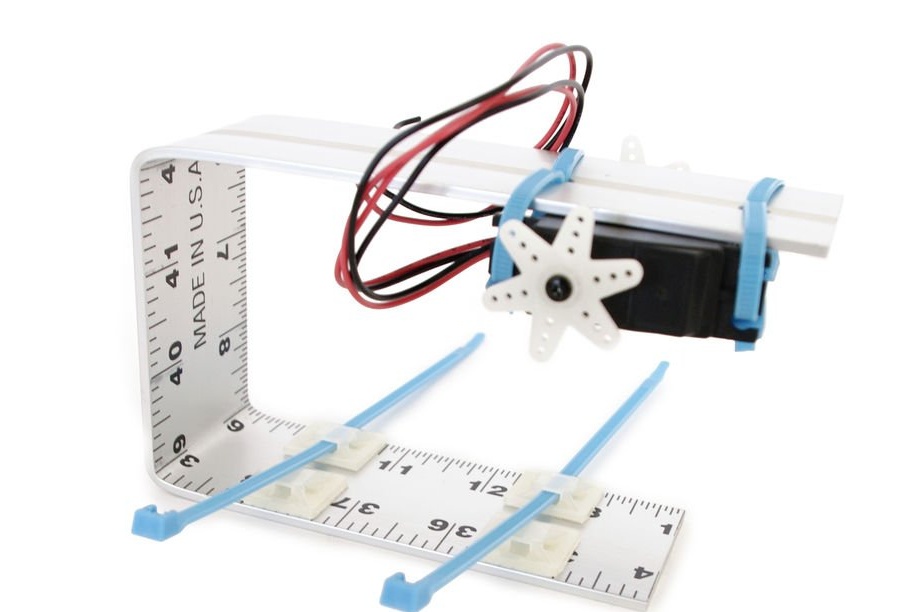
Korak 13: I još nekoliko razloga za stezaljke
Pričvrstite dva para baza na donju stranu zakrivljenog ravnala u obliku slova U.
14. korak: Osiguravanje baterija
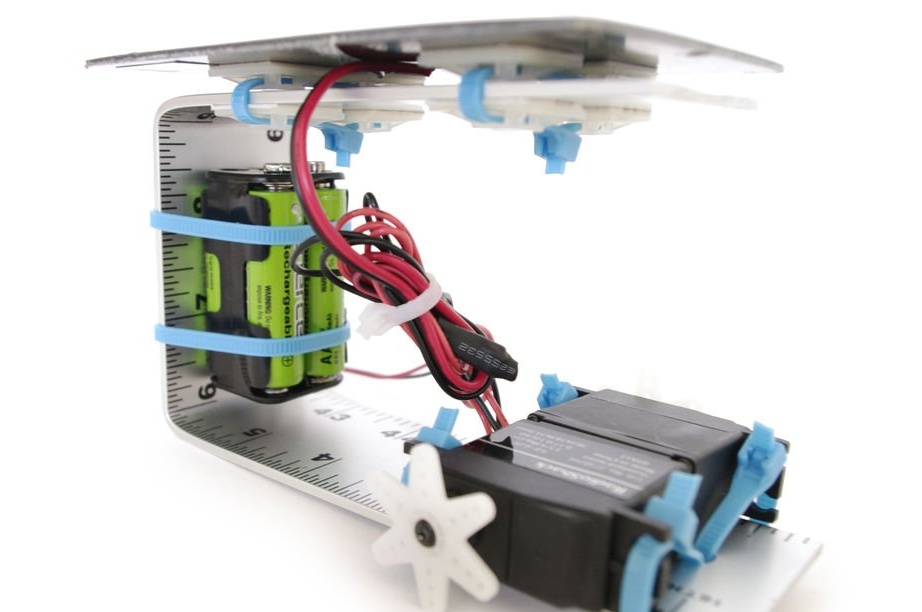
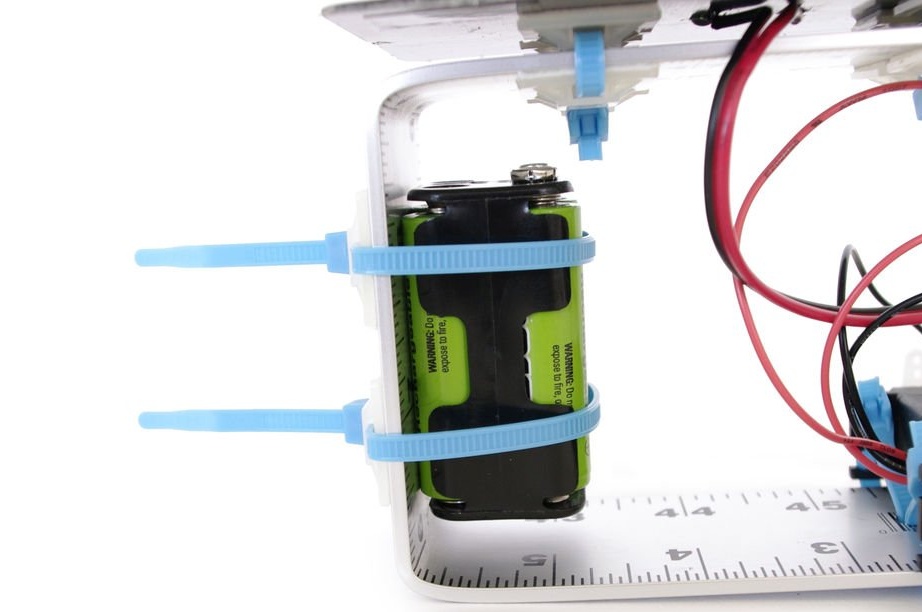
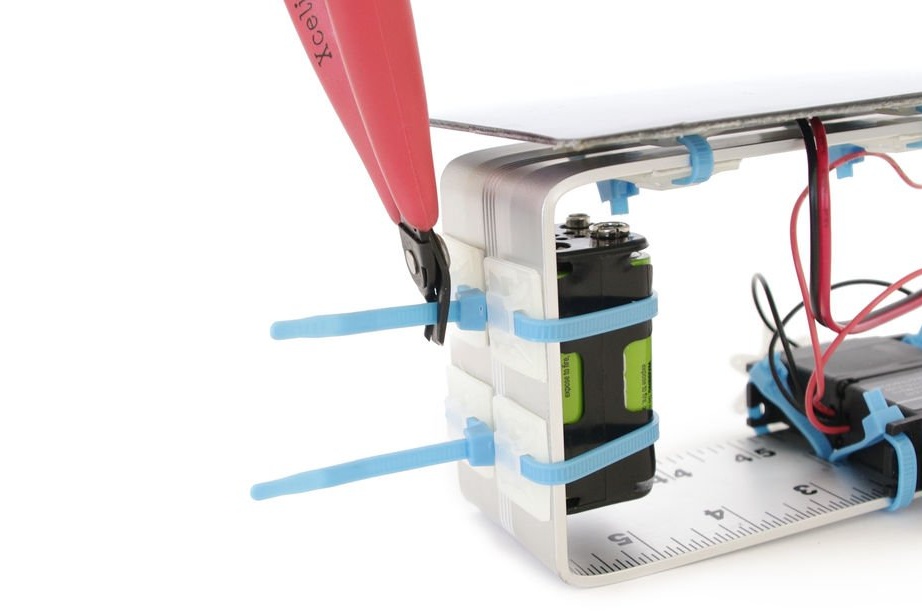
Osigurajte baterije stezaljkama unutar ravnala u obliku slova U tako da čvrsto i nepokretno sjede na mjestu.
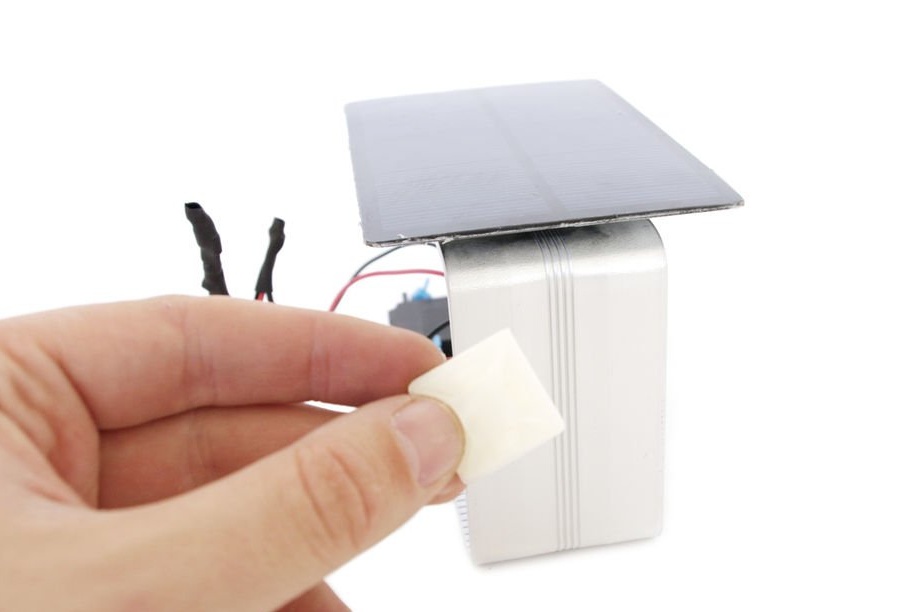
Korak 15: Obrezivanje


Izrežite kuke na plastičnim zidnim nosačima.
Korak 16: Kotači
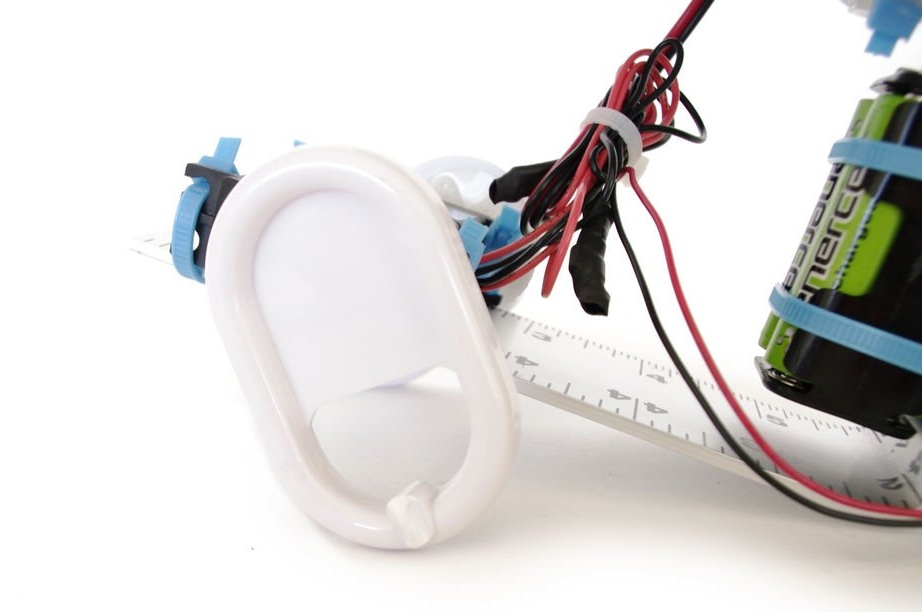
Zalijepite zidne nosače na vanjske zupčanike servo-uređaja (ovo će biti nešto poput kotača).
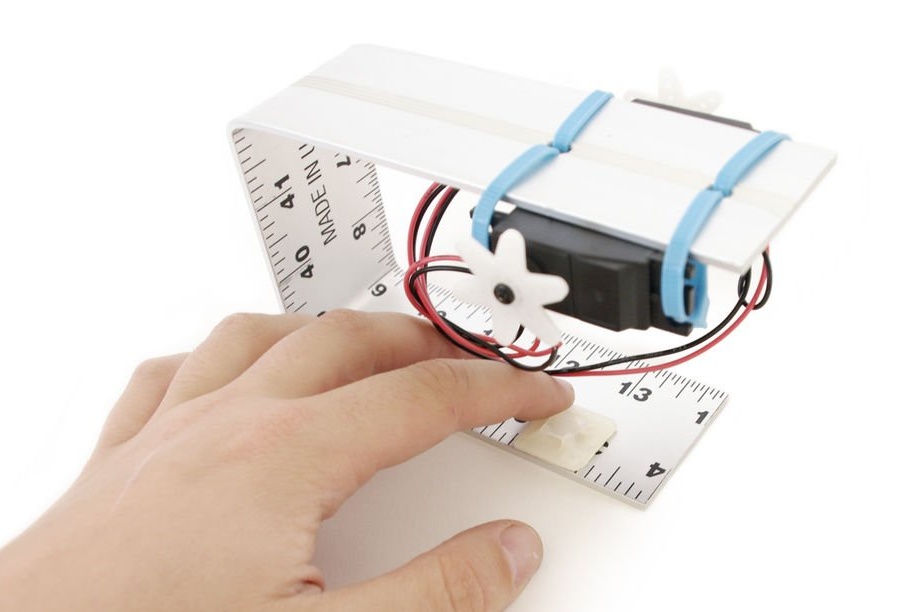
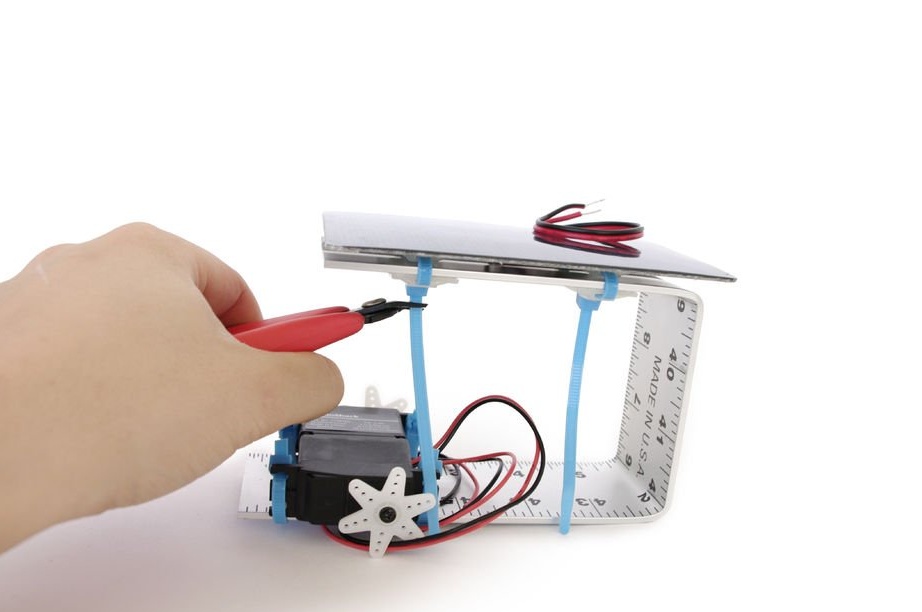
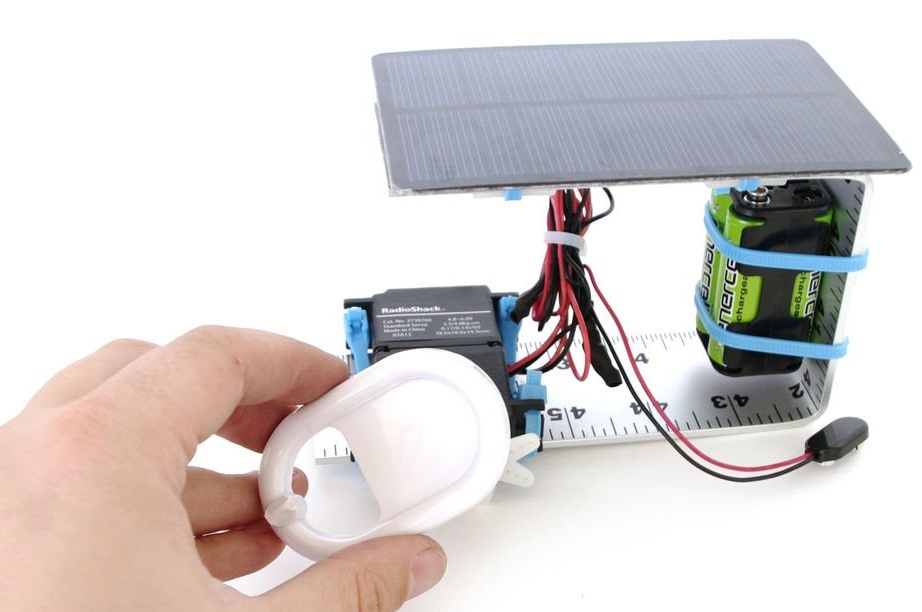
Korak 17: Uključite!

Priključite kabel u bateriju i robot će se početi kretati.