

Autor je projekt temeljio na jednostavnijoj verziji. domaći brodove i usavršio je. Senzori se postavljaju u čamac kako bi se izbjegle prepreke i premjestilo u svjetlost. Kako se koristi kontroler u čamcu Težak, ispred je ugrađen ultrazvučni senzor, a sa strane se nalaze senzori svjetla. Ovaj se jednostavni čamac ne sruši u zidove, a upravlja se svjetiljkom.
Materijali i alati:
- Izolacijska traka / ljepljiva traka
- Termo-ljepilo vrućim ljepilom
- DC motori 2 kom
- Plastične boce 2 kom
- žice
- Mali propeleri 2 kom
- Arduino, računalo i USB kabel
- Plastična kutija
- 9V baterija i priključak
- Power diode (tip 1N4004)
- Otpornici
- Tranzistor MOSFET ili TIP 120
- Dvije fotoćelije i dva gumba
- škare
- lemljenje lemilicom

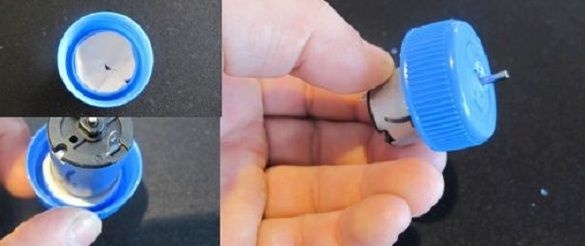
Korak 1. Instalacija motora.
Poklopac se vadi iz boca i u svakoj od njih se pravi rupa. Unutar korice autor utisne vruće ljepilo bez zatvaranja rupa. Postavio je osovinu motora u rupu i stavio je na ljepilo. Nakon što se ljepilo osuši, osovina se slobodno rotira. Isti se postupak događa s drugim poklopcem.
Korak 2. Pričvršćivanje boca.
Boce su bile pričvršćene zajedno pomoću principa splava uz pomoć tri trake ljepljive trake.

Korak 3. Lemljenje motora.
Budući da motori montirani na utikače nisu imali žice, bilo ih je potrebno lemljenje, duljina žica bila je oko 25-30 cm.

Korak 4. Rez u bocama.
Da bi žice pale u trup broda, s njihove gornje strane napravljen je mali utor.

Korak 5. Osiguravanje motora.
Nadalje, autor izvrće poklopce na bocama, jer se nisu dobro uvijale, morao sam upotrijebiti vruće ljepilo. Žice se guraju kroz pripremljene rupe na bocama.

Korak 6. Slučaj.
Plastična kutija lijepi se za dvije boce. U ovom kapacitetu za elektroniku možete napraviti rupe za žice ili držati žice kroz stražnju stranu kutije. Rupe za žice na bocama izolirane su vrućim ljepilom.

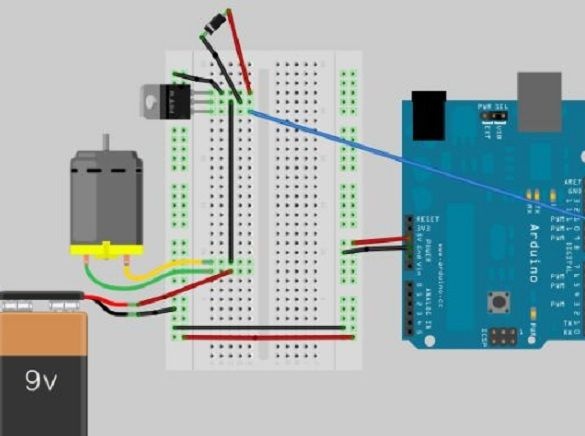
Korak 7. Dijagram ožičenja.
Krug koristi TIP 120 tranzistor kao sklopku (možete koristiti slične MOSFET ili Darlington tranzistore). Koristi se za prebacivanje opterećenja pri potrošnji velike količine struje, jer Arduino nema dovoljno snage za motore. Ovaj se krug sastavlja za prvi, a zatim za drugi motor (drugi motor nije potreban za drugi motor).
Korak 8. Senzori.
Ultrazvučni senzor je izvrstan za prednji dio plovila, upozorava na prepreke na putu. Fotocelice djeluju poput antena i koriste se za plivanje broda u svjetlu.Gumbi sa strane koriste se kao senzori prepreka. Možete također izmijeniti kôd i koristiti druge senzore, poput infracrvenog.

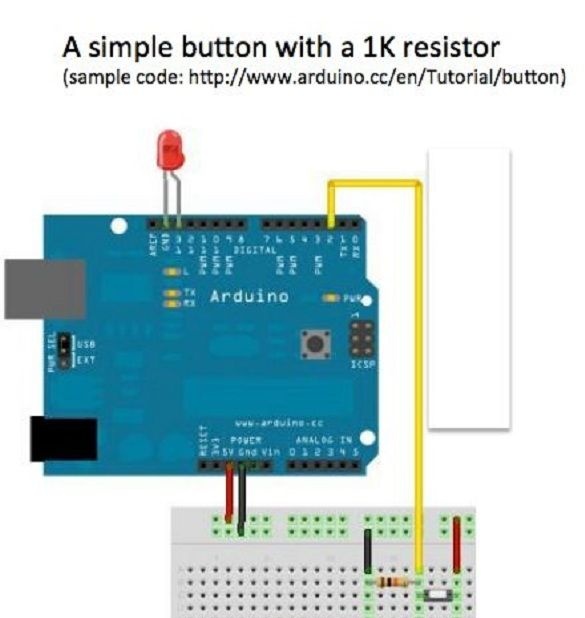
Korak 9. Sheme za senzore.
Dijagram prikazuje vezu jednostavnog gumba i 1K otpornika. Shema za oba gumba se ponavlja, gumbi su postavljeni na obje strane plovila. Oni će biti odgovorni za promjenu kretanja plovila u sudaru.
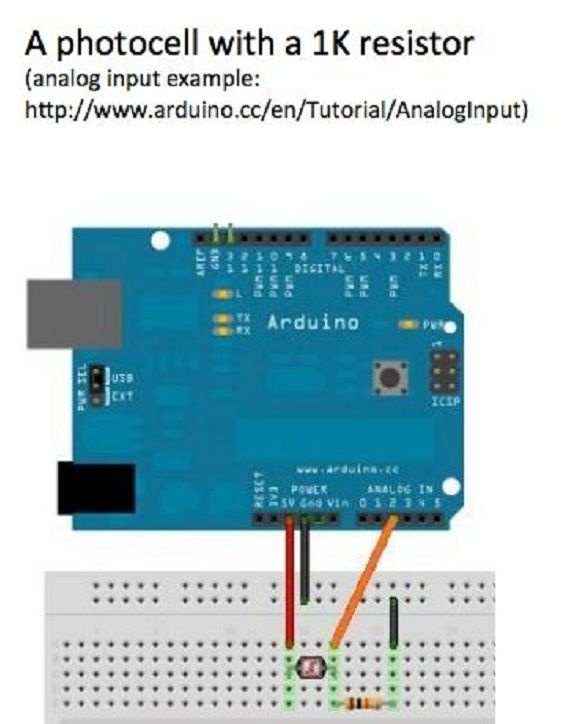
Sljedeća slika prikazuje krug s 1K otpornikom i fotoćelijom. Autor ju je izveo 2 puta, a fotoćelije je postavio na suprotne strane broda.
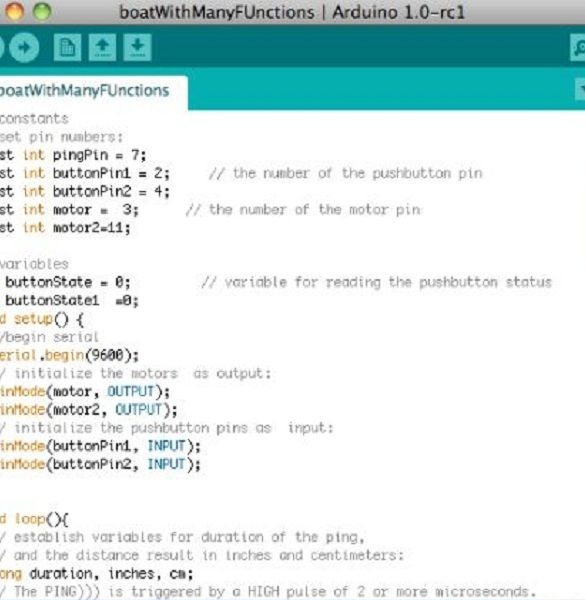
Korak 10. Programski kod.
Autor je pružio priliku za preuzimanje svog koda za upotrebu, osiguravajući na taj način osnovnu funkcionalnost za one koji će sastaviti takav brod. Kod uključuje podršku za foto ćelije, daljinomjer i tipke. Brod će pokušati izbjeći prepreke ispred sebe, a okreće se u suprotnom smjeru kada naiđe na prepreke sa strane. Ako nema želje za korištenjem čitavog niza senzora, samo neki od njih imaju kod za svaki zasebno. Možete preuzeti sve kodove ispod članka.
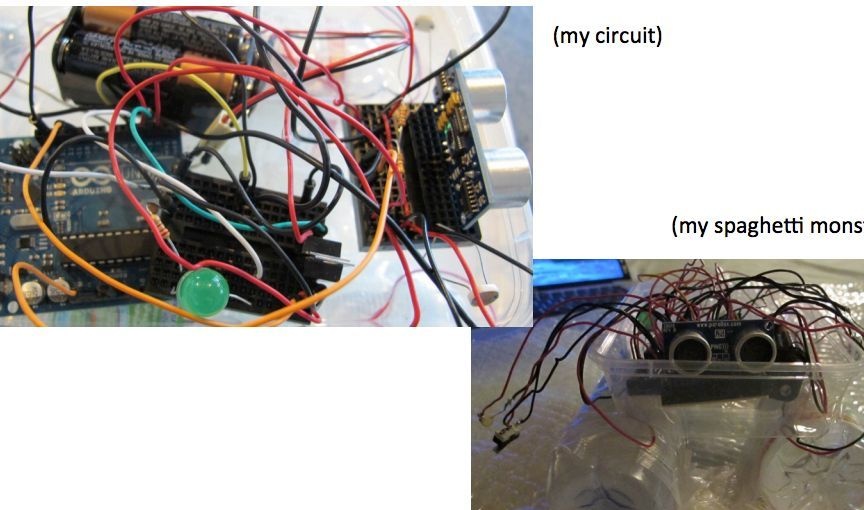
Korak 11. Sastavljanje broda.
Skupljeni krug, Arduino i baterije su u kutiji.
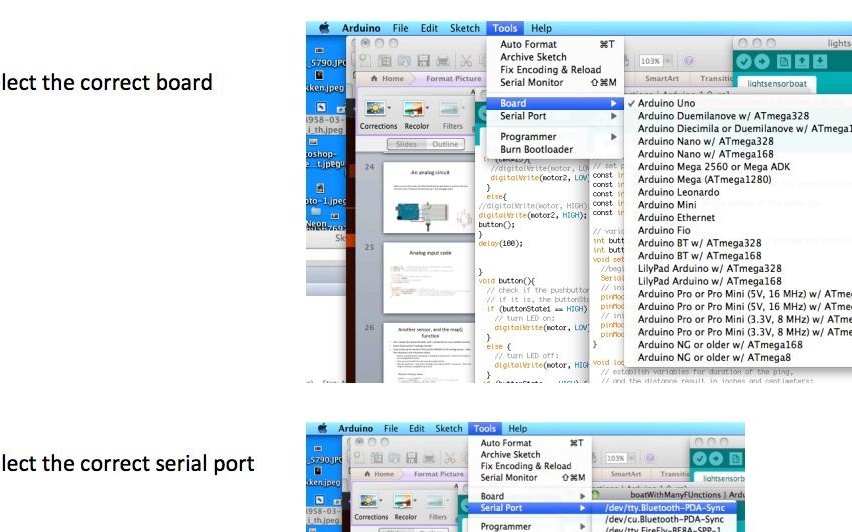
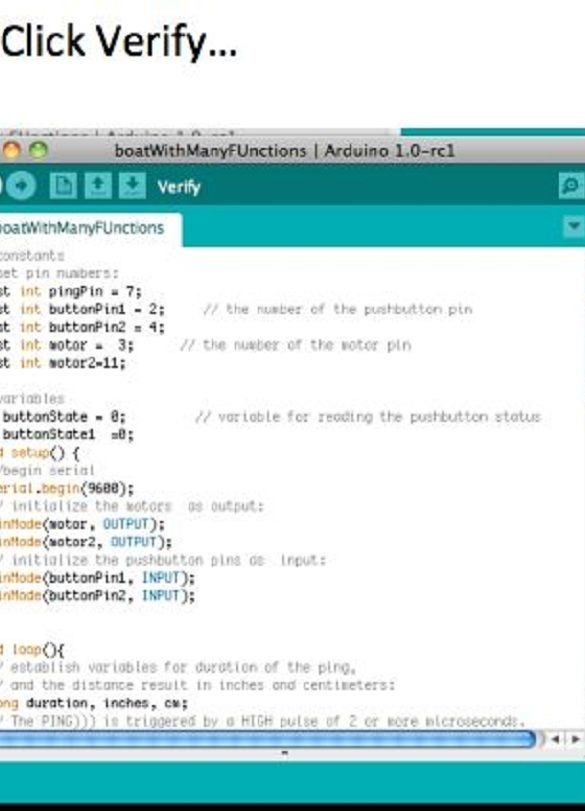
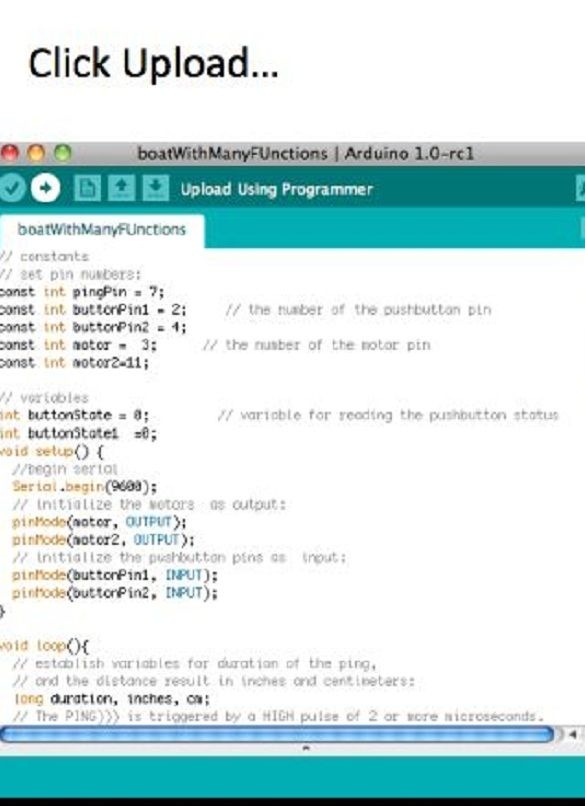
Korak 12. Preuzmite skicu.
Zatim se otvara Arduino IDE odabirom ispravne datoteke i priključka, nakon čega je autor sastavio i prenio kôd u kontroler.
Korak 13. Otporan na vodu i ispitivanje.
Autor je vrućim ljepilom dodatno izolirao sva potencijalna mjesta ulaska vode. Također je izolirao sve žice iz kratkog spoja. Spremnik s Arduinom prekriven je istim okvirom i zapečaćen električnom trakom. Propeleri su pričvršćeni na motore. Ovdje je brod spreman, sada možete započeti s testiranjem na vodi.



Video s preliminarnim testom plovila: