


Pa krenimo. Prvo morate odlučiti o komponentama i krugu. Princip rada kruga je jednostavan: slabi signal iz mikrofona se pojačava i šalje na analogni pin Arduino. Kao pojačalo koristit ću operativno pojačalo (komparator). Omogućuje puno veći dobitak u odnosu na konvencionalni tranzistor. U mom slučaju, čip LM358 poslužit će kao ovaj komparator, a može se naći doslovno bilo gdje. A košta prilično jeftino.
Ako niste mogli pronaći LM358, tada na njegovo mjesto možete staviti bilo koje drugo odgovarajuće operativno pojačalo. Na primjer, komparator prikazan na fotografiji stajao je na ploči pojačala signala infracrvenog prijemnika na televizoru.

Sada pogledajmo krug senzora.
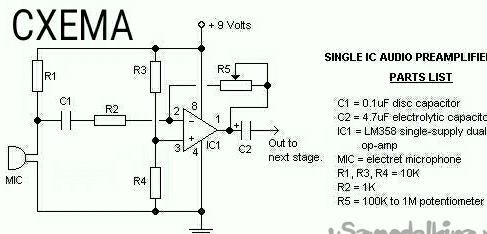
Uz operativno pojačalo trebat će nam još nekoliko lako dostupnih komponenti.
Najobičniji mikrofon. Ako polaritet mikrofona nije naznačen, samo pogledajte njegove kontakte. Minus jedan uvijek ide u slučaj, a u krugu je, prema tome, spojen na "zemlju".

Zatim nam treba otpornik od 1 kΩ.
Tri otpornika od 10 kΩ.

A drugi otpornik od 100 kΩ je 1 MΩ.
U mom slučaju, otpornik od 620 kOhm koristi se kao "zlatna sredina".
Ali u idealnom slučaju morate koristiti varijabilni otpornik odgovarajuće ocjene. Štoviše, kako pokazuju eksperimenti, veća ocjena samo povećava osjetljivost uređaja, ali javlja se i više "buke".

Sljedeća komponenta je kondenzator 0,1 uF. Označena je "104".

I još jedan kondenzator, na 4,7 uF.
Sada prelazimo na montažu. Sastavio sam sklop s montiranom instalacijom.

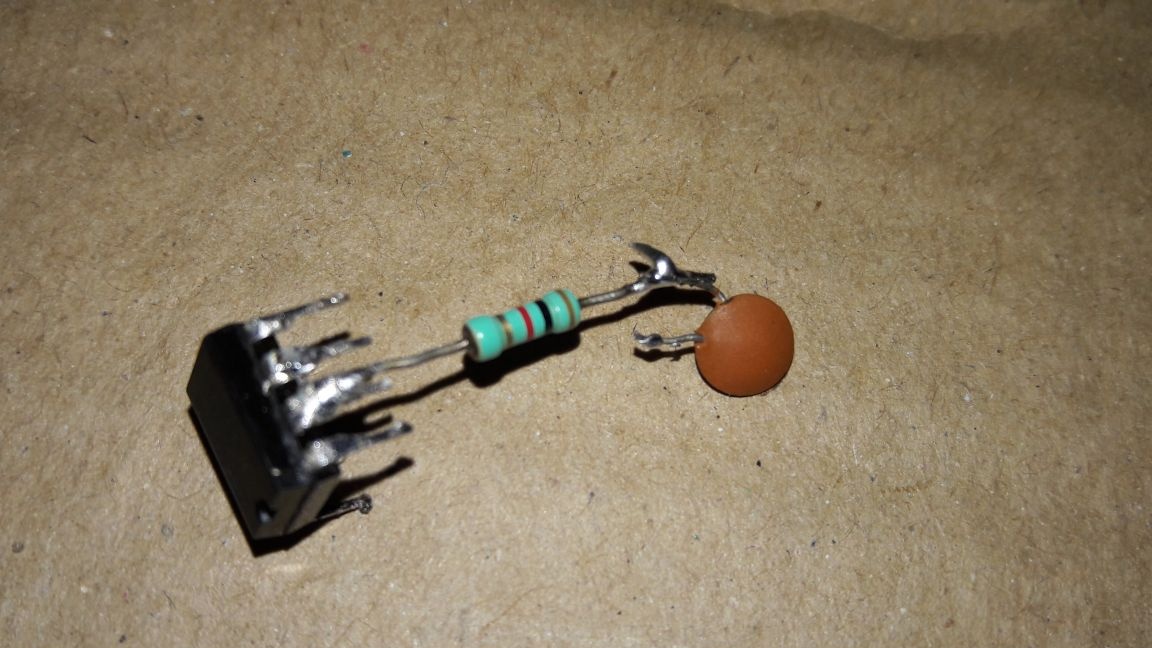
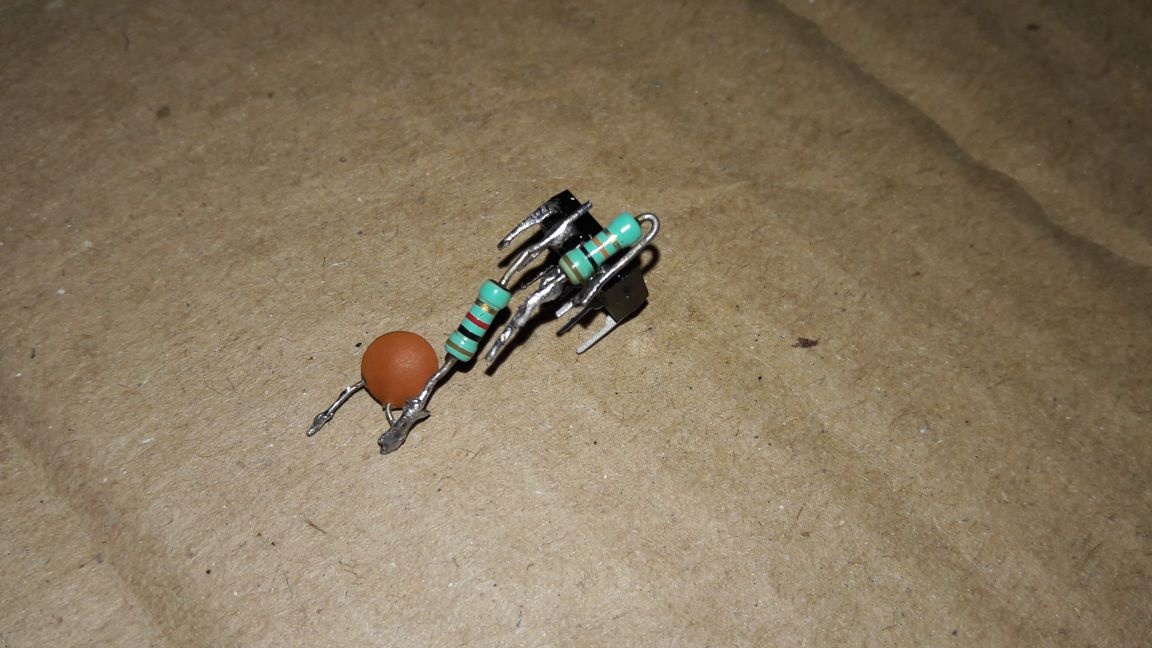







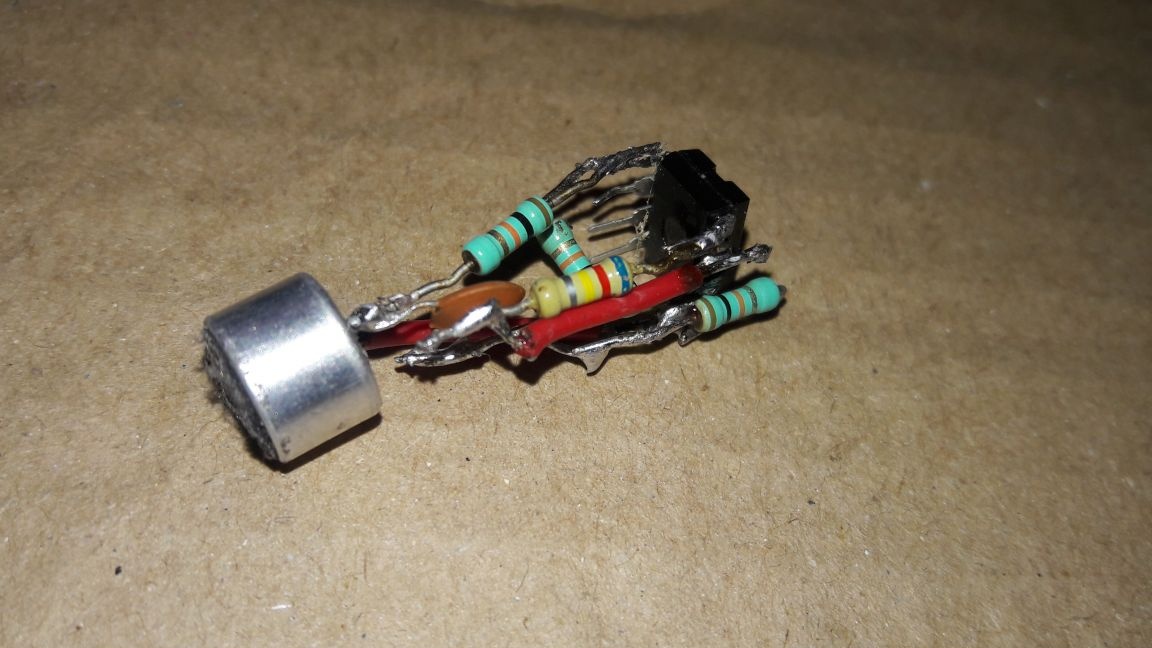

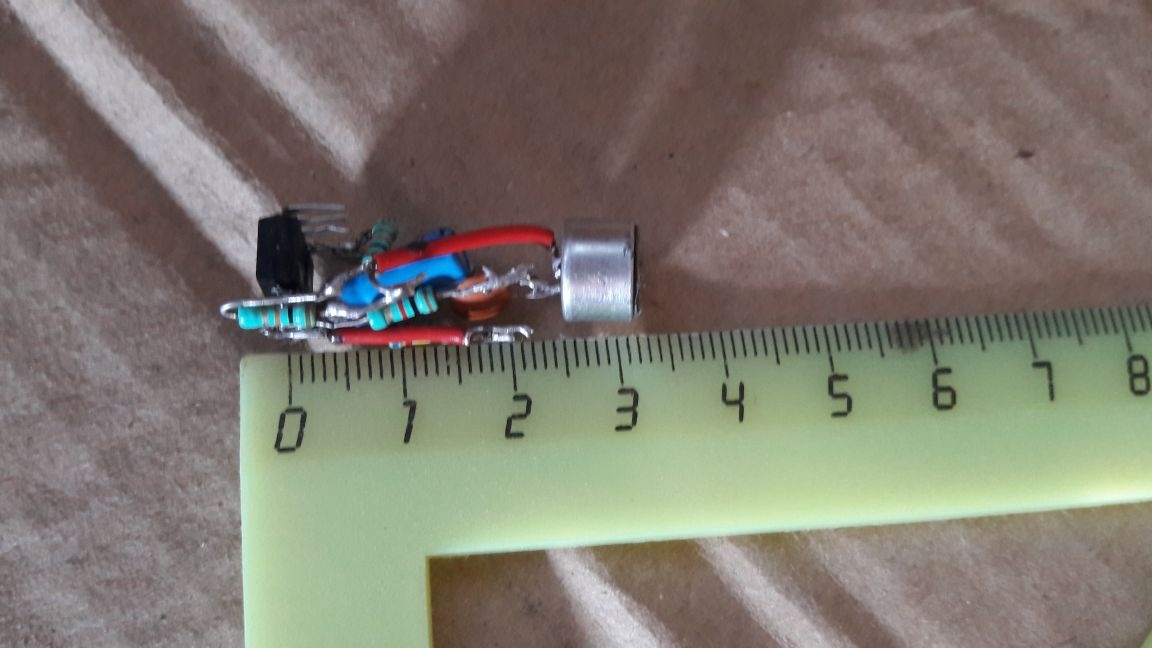
Skupština je završena.Krug sam ugradio u futrolu koju sam napravio od malog komada plastične cijevi.
Nastavljamo s testiranjem uređaja. Spojit ću ga s pločom Težak UNO. Ulazimo u razvojno okruženje Arduina i otvaramo primjer AnalogReadSerial u odjeljku Osnove.
poništavanje postave () {
Serial.begin (9600); // spojite serijsku vezu na 9600 baud
}
void petlja () {
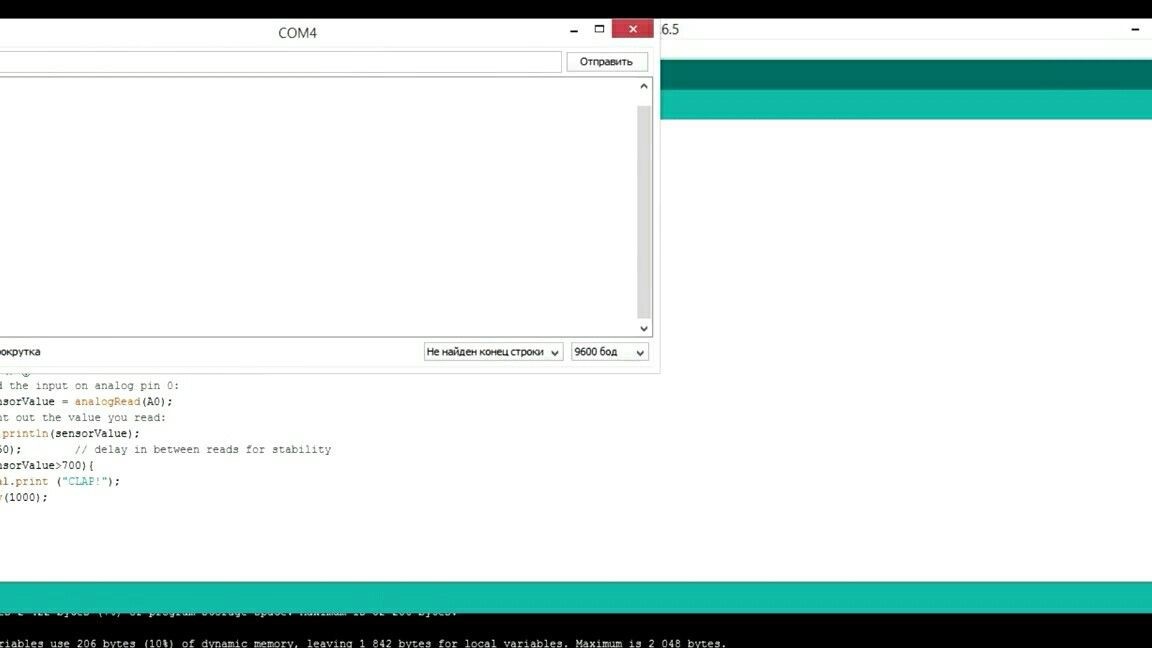
int sensorValue = analogRead (A0); / * pročitajte vrijednost s nulte analogne pinove i spremite je u varijabilnu osjetnicuValue * /
Serijski.println (sensorValue); // na ulazu iznesite vrijednost
kašnjenje (1); // pričekati jednu milisekundu za stabilizaciju
}Prije utovara u ploču mijenjamo kašnjenje za 50 milisekundi i učitavamo ga. Nakon toga izrađujemo probni pamuk i slijedimo indikacije. U trenutku pljeskanja skaču, pokušavaju približno zapamtiti ovu vrijednost i vrate se skici.
Dodajte nekoliko crta skici.
ako (sensorValue> X) {
Serijski.print ("CLAP");
kašnjenje (1000);
}Umjesto "X", ponovo umetnite istu vrijednost, učitajte i pljeskajte. Tako nastavite dok ne pronađete optimalnu vrijednost odziva. Uz precijenjene vrijednosti, uvjet će biti ispunjen samo pamukom na vrlo maloj udaljenosti. Uz nižu vrijednost, uvjet će biti zadovoljen pri najmanjoj buci ili zvuku koraka.
S pravilnim odabirom otpornika R5, ovaj se senzor može pretvoriti u digitalni i može se koristiti u hardverskim prekidima. Potencijal ovog dizajna je ogroman, na temelju njega možete sastaviti gomilu različitih projekata, a njegova jednostavnost čini uređaj dostupan svima.
Zaključno, predlažem da pogledate video u kojem je sve jasno prikazano. Postupak umjeravanja i sastavljanje najjednostavnijeg pamučnog prekidača također su objašnjeni puno detaljnije.
Nadam se da ste uživali. Želim vam uspješnu skupštinu!