
Želim izgraditi nešto poput lakog ATV-a ili slično na temelju motora s mopedom.
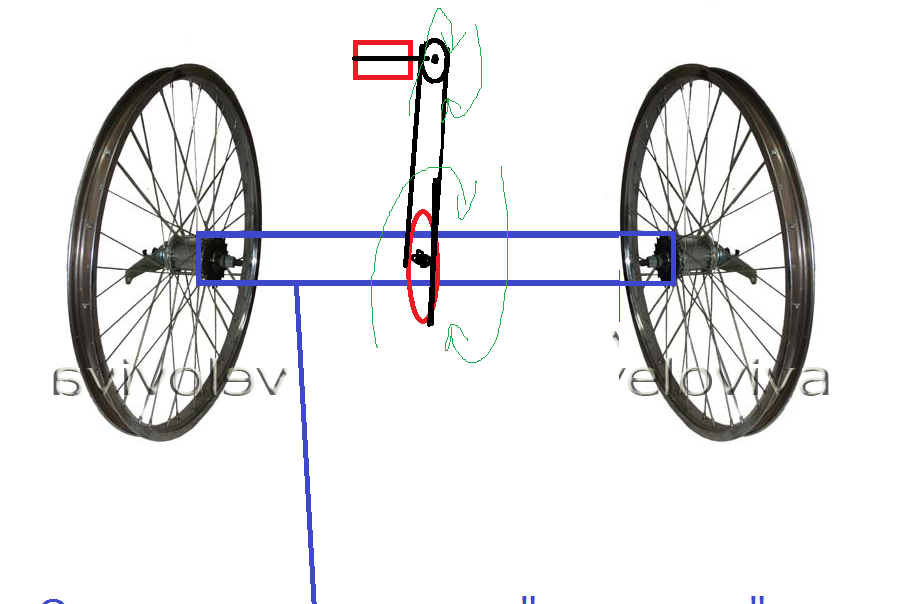
Razmišljam kako napraviti analog diferencijala. Što ako uzmete dva stražnja kotača bicikla i zavarite osovinu na "lančanike".
Teoretski, pri vožnji u ravnoj osi, osovina će se sama zaključati, a to je u redu, jer će postojati dobra sposobnost prelaska, samo se jedan kotač neće zakretati u slučaju zastoja.
Pri skretanju (recimo lijevo) desni će se kotač „odvojiti“ od osi jer čini veći broj okretaja, a lijevi kotač će prenositi okretni moment s motora. ALI! Ispada da je obrnuto, okretni moment za bolji okret koji nam treba na desnom kotaču.
Iako u ovom slučaju neće biti "brave mosta" i ATV bi se trebao normalno okretati?
Iako ako zamislite situaciju da smo se zaustavili, okrenuli smo upravljač i krenuli, prije trenutka kretanja dva kotača odmah stupaju u akciju, a prilikom vožnje jedan se isključuje. Općenito, kao što je i po meni, ideja je barem jedinstvena))