

Robot DIY će biti izvrsna igračka za djecu, a s njom se možete igrati i rodbina ili prijatelji. Suština robota je sljedeća. To je kutija s prekidačem. Čim netko klikne prekidač na kutiji, počinju se otvarati vrata iz kojih ruka izlazi i prekidač vraća u prvobitno stanje. Unatoč vanjskoj jednostavnosti robota, u stvari, sve to izgleda prilično smiješno.
Osnova za stvaranje robota je sklop Težak, Postoje i neki mehanički elementi o kojima će biti govora u nastavku. Razmotrimo detaljnije kako mogu učinite to sami sastavi takvog robota.
Materijali i alati za izradu:
- Arduino ploča, bilo koja sa PWM izlazima;
- servomotori, dva komada (prikladno model Futaba - S3003, snaga takvog motora je dovoljna za otvaranje vrata, uređaj proizvodi do 3,2 kg / cm snage);
- baterije;
- prekidač tipa SPST ili SPTT;
- preklopka za kontrolu snage baterije;
- trebate gumb za ponovno pokretanje Arduino-a;
- žice, skakači i ostale sitnice.

Pored toga, dodatno će vam trebati mjenjač (pogodan za radio kontrolirane automobile), ploča za električni motor zvana Arduino štit motora, RC servo motor. Te su komponente potrebne kako bi se okvir pomaknuo, poput autora.
Za smanjenje razine buke tijekom rada uređaja potrebni su kondenzator elektrolitičkog tipa nominalne vrijednosti 10mF, 10K otpornik i pretvarač 74HC04.
Proces proizvodnje robota:
Prvi korak. Kako napraviti kutiju
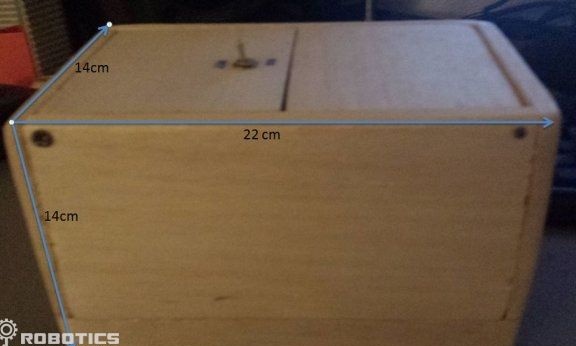
Da biste stvorili kutiju, to jest tijelo robota, morate pronaći šperploču ili plute. Uz to vam je potrebno snažno ljepilo za lijepljenje drva. Važno je razumjeti da što više građevina teži, to će se više potrošiti. Što se tiče veličine kutije, ona je 22cm x 14cm x 14cm.
Drugi korak Shematski dijagram elektronički dijelovi
Vrh robota uključuje glavnu ploču Arduino, dva servo i prekidač. Što se tiče kruga, koji je odgovoran za količinu buke, može se zamijeniti običnim otpornikom.
Servo pogoni pokreću se kroz peti pin Arduino ploče. Što se tiče signalnih žica, one su povezane na kontakte 9 i 10. Zahvaljujući tim PWM kontaktima kontrolira se kut rotacije servomotora. To je kut od 0 do 180 stupnjeva.
Crveni gumb potreban je za ponovno pokretanje Arduino-a.
Na dnu kruga je Arduino ploča oklopa motora.Na ploči možete vidjeti dva kanala, A i B, zahvaljujući njima možete po želji spojiti dva motora odjednom. Glavni zadatak ove ploče je da s njom možete programirati brzinu vrtnje, smjer, prekide za bilo koji kanal motora. Ako pogledate dijagram, tada se koristi kanal B, dok kontakt 13 određuje smjer, kontakt 11 je brzina, a kontakt 8 koristi se za upravljanje kočnicama.
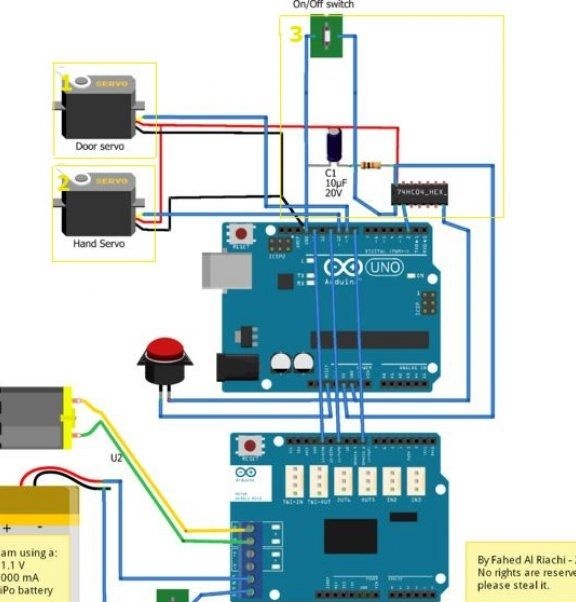
Izvor napajanja je baterija 11,1 / 1000 mA, a povezuje se s Arduino pločom motora oklopa. Ako se neće koristiti, baterija je izravno povezana s glavnom pločom.
Treći korak Ugradnja motora
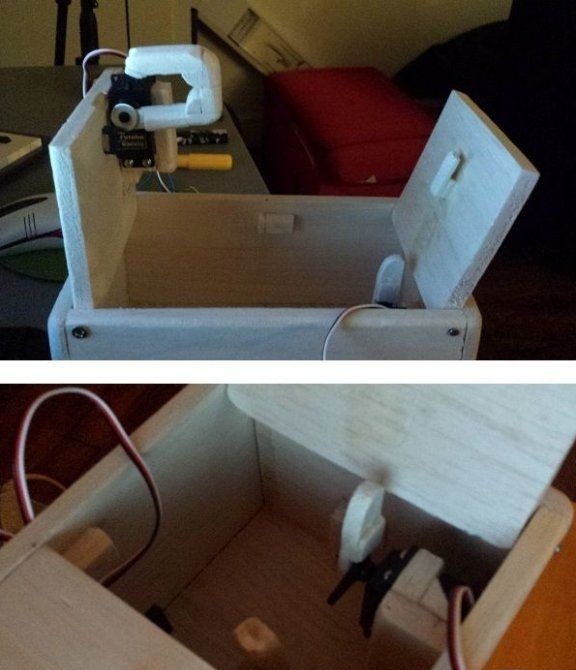
Servo pogon i ruke instalirani su eksperimentalno, u praksi morate provjeriti rade li mehaničari ispravno. Za provjeru radijusa odstupanja motora možete koristiti Arduino IDE program.
Za izradu ruku uzetih drva bilo koje vrste. Glavna stvar je da je svjetlost, jer će se u protivnom potrošnja energije povećati. Što se tiče veličine ruke, ona se podešava tijekom instalacije, odabirom željene duljine, postiže se željeni učinak.
Gurač poklopca i ruka montirani su tako da se tijekom rada ne dotiču servomotoru.
Četvrti korak Spojimo servomotor i prebacimo se na Arduino
Korištenjem žica i skakača morate povezati sve elektroničke elemente jedan prema drugom prema navedenoj shemi. Žice moraju biti položene tako da ne ometaju pokretne elemente robota.
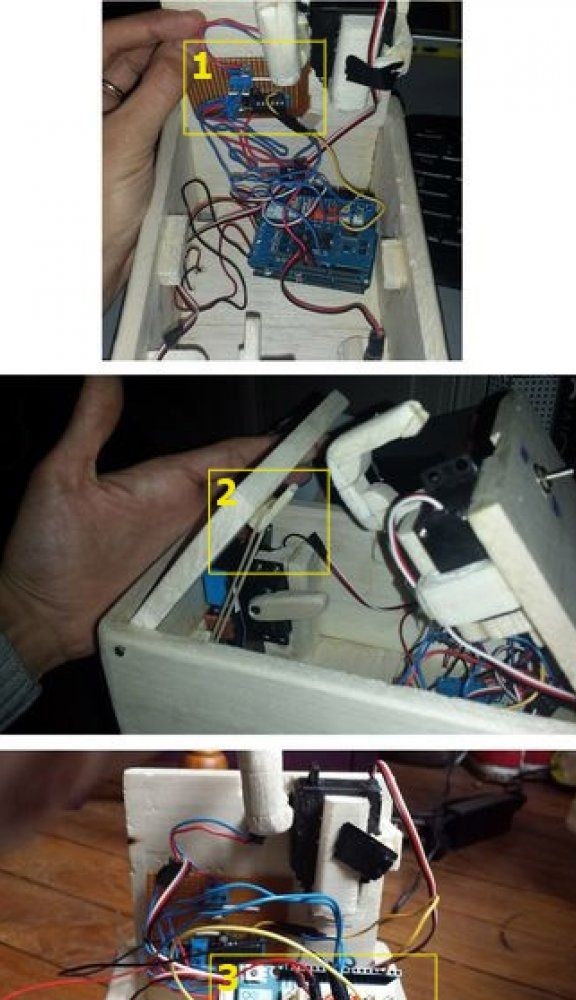
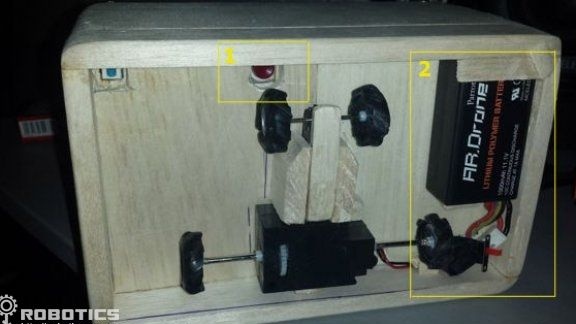
Pod brojem 1 možete vidjeti kako je spojen i gdje se nalazi sklopni krug. Broj 2 označava takav element kao elastična traka, potreban je za otvaranje vrata s određenom napetošću. Pa, broj 3 označava oklop motora instaliran na Arduinu.
Peti korak Ugradnja mehaničkog dijela za pomicanje kutije
Na dnu kutije nalazi se baterija, motor s kotačima, mjenjač, tipka za resetiranje i preklopnik za kontrolu snage robota. Prije pričvršćivanja elemenata, morate izračunati ravnotežu težine kutije. Da bi robot bio stabilan, pored vodeće osi ugrađuje se još jedna.
Korak šesti Još jedna dodatna značajka
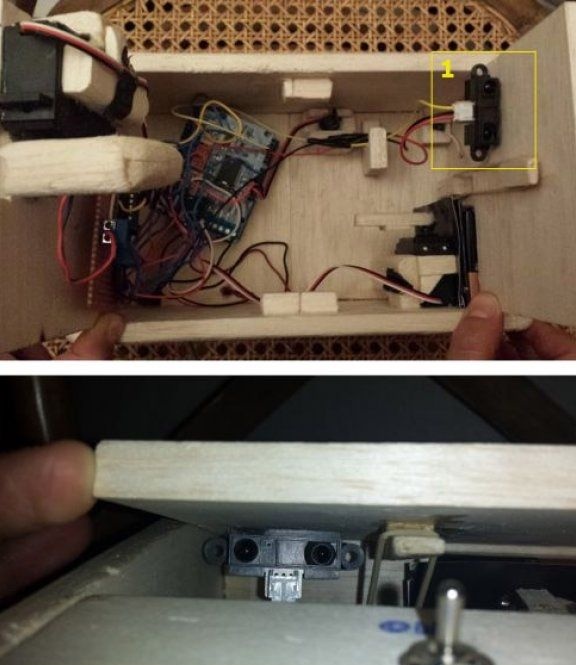
Da bi robot odredio smjer kretanja, može biti opremljen IR senzorom. U isto vrijeme, kad netko pokuša dodirnuti preklopnik, okvir će se pomicati udesno i ulijevo. U ove je svrhe prikladan senzor GP2Y0A21, ima tri žice. Žuta mora biti povezana s trećim iglom Arduino-a, crvena u pin 5, a crna uzemljena.
To je sve, spreman je jednostavan i ujedno smiješan robot. Takva igračka će donijeti radost ne samo djetetu, već i iznenaditi mnoge odrasle.
Oprema: