
Materijali i alati za izradu:
- navojne osovine;
- šperploča;
- vijci i matice;
- kuglični ležajevi;
- stepenički motori poput Nema 23;
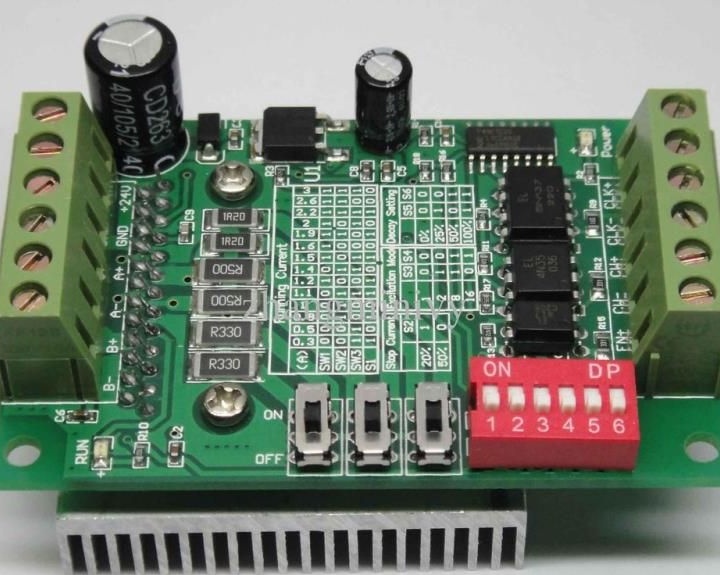
- za koračne motore potrebni su pogonitelji TB6560;
- instalacija se napaja naponom 24 V 15 A;
- Arduino UNO R3;
- metalne čahure, kao i čahure od najlona (moguće od kaprolona ili fluoroplastike);
- žice.









Proces proizvodnje:
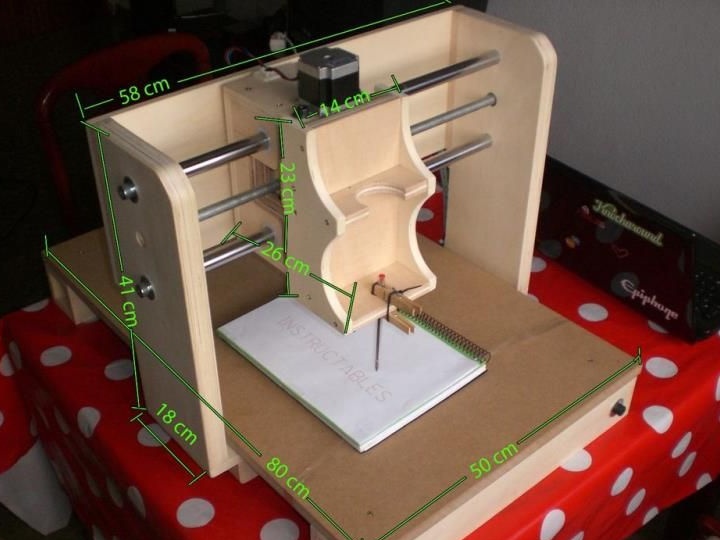
Prvi korak. Izrada baze stroja (X osovina)
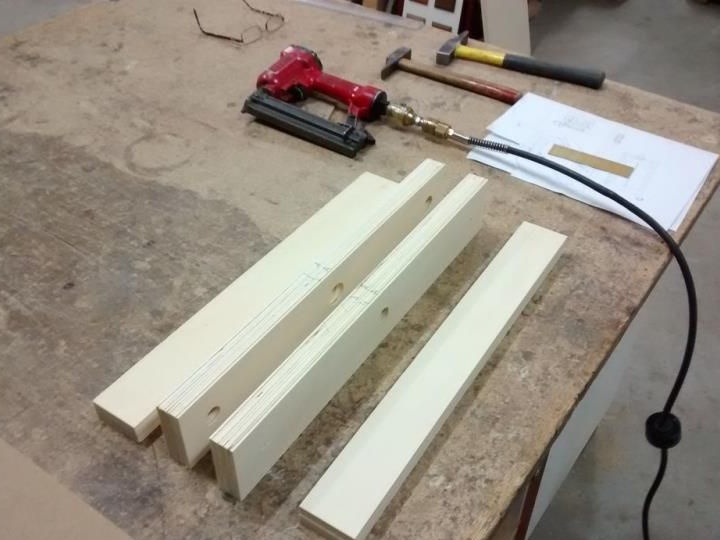
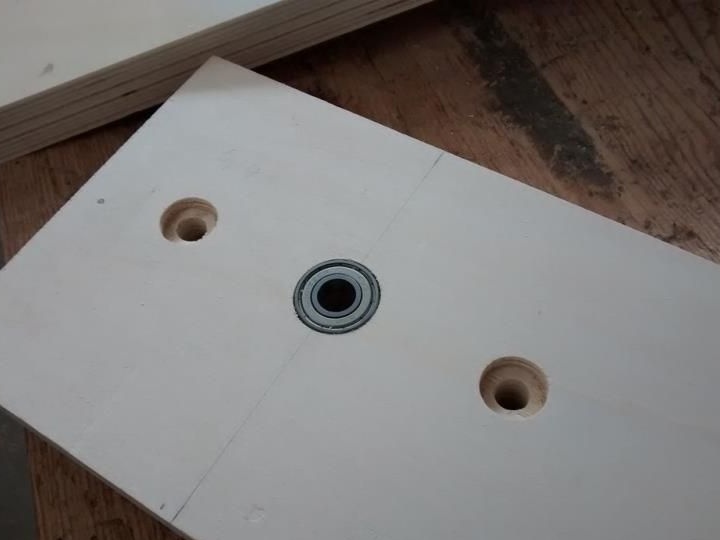
Da biste napravili bazu, trebat će vam nekoliko šipki u koje ćete morati bušiti nekoliko slijepih i kroz rupe. Zatim ugradite metalne osovine, one služe kao pogon za X osi.
Navojno vratilo postavljeno je u sredini, a na čeličnim osovinama sa strane su postavljene dvije vodeće osovine. Kad se navojno vratilo okreće, nosač pomiče navojni stol duž osi X.
Šipka bi trebala biti što deblja, jer što je teža baza, stroj će biti pouzdaniji tijekom rada. A to zauzvrat poboljšava rad tijekom rada.






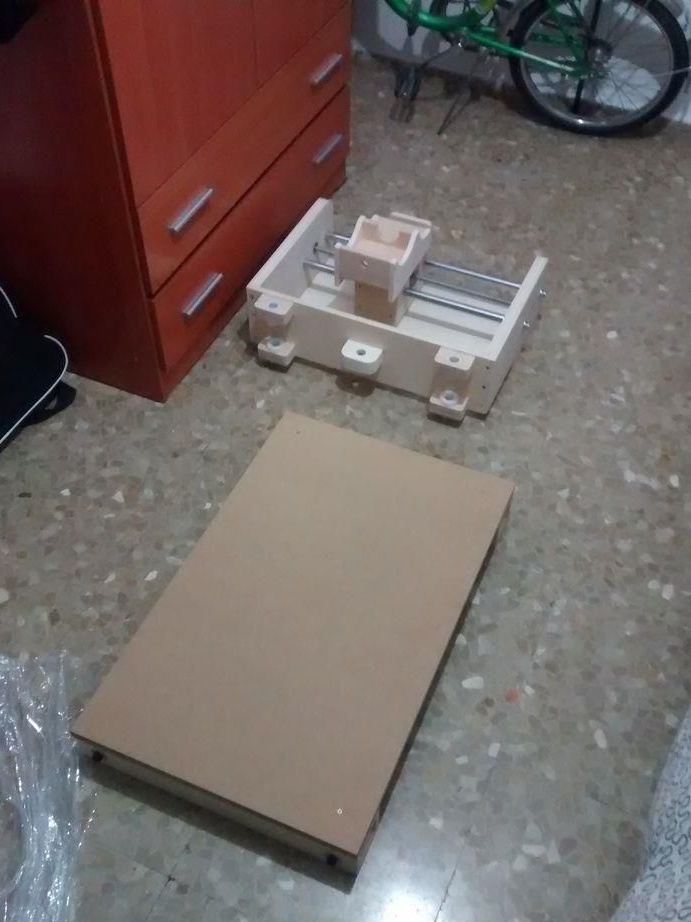
Drugi korak Izradite os Y
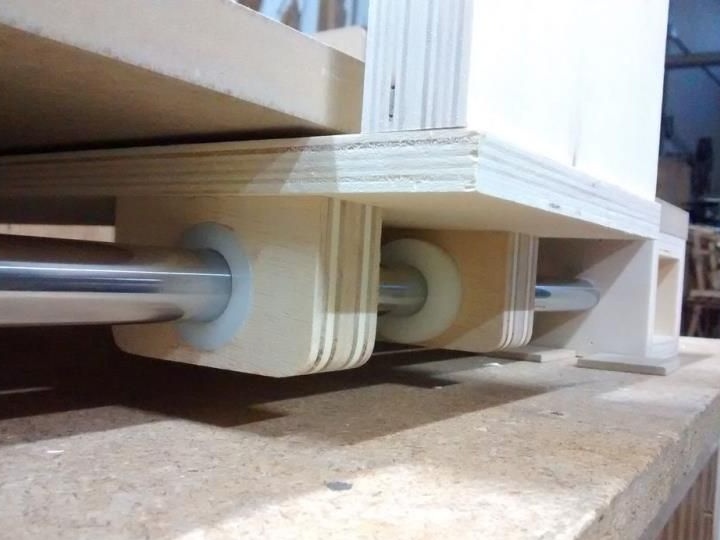
Struktura portala za osi Y kreirana je na isti način kao i baza X. Portal je fiksiran na pomičnom stolu koji se kreće duž osi X. Kako se to događa, možete vidjeti na fotografiji.




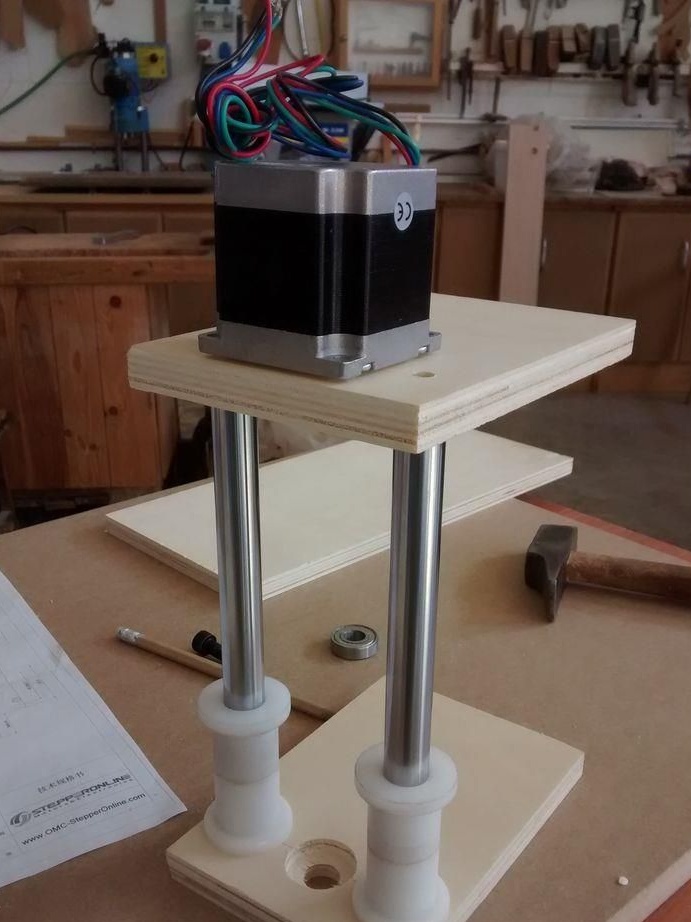
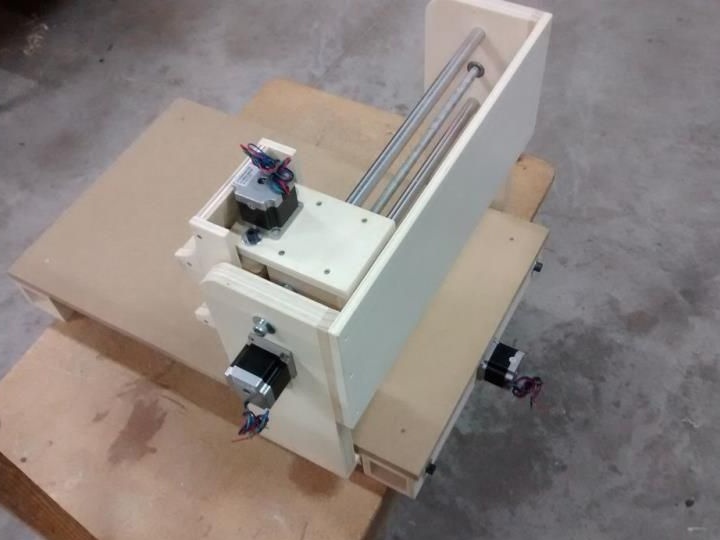
Treći korak Napravite osi Z
Osovina Z stvorena je točno poput dvije prethodne. Zbog ove osi dolazi do vertikalnog pomicanja radnog tijela, koje hrani alat.











Četvrti korak Skupština skupštine
Nadalje, nakon što su svi elementi već proizvedeni, stroj se može sastaviti i taj postupak nije kompliciran. Za spajanje elemenata koriste se vijci s maticama. Dimenzije stroja mogu biti različite, sve ovisi o osobnim potrebama.Ako se tijekom postupka montaže bilo koji element raspadne, za popravljanje ne trebate koristiti ljepilo, najbolje je ponovo proizvesti element. U tom će se slučaju osigurati potrebna krutost elemenata.


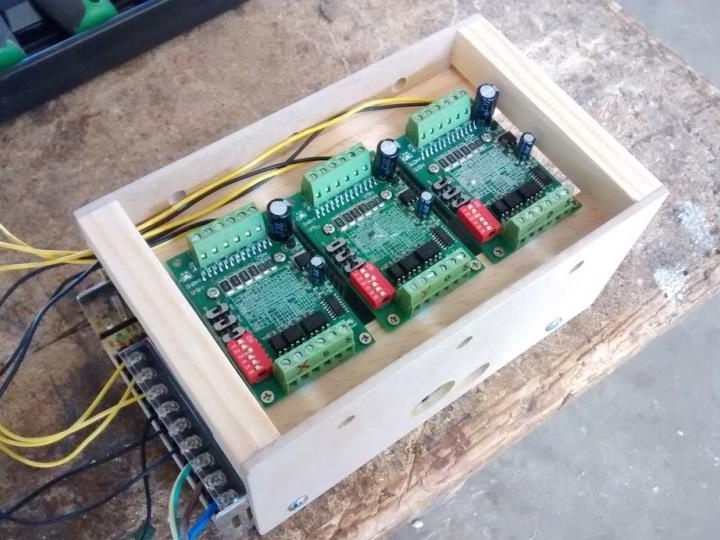
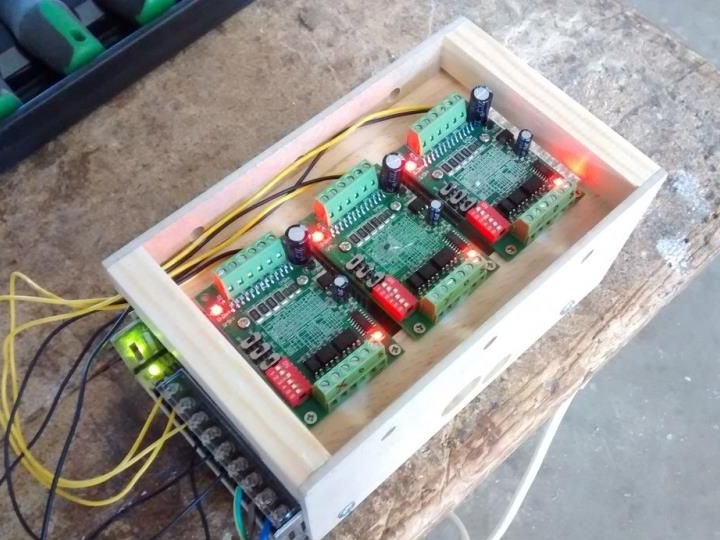
Peti korak Elektronički dio uređaja
Kad se mehanički dio sastavi, možete pristupiti procesu spajanja elektronike. Arduino morate povezati s vozačima i stepper motorima. Svakom vozaču je potreban izvor napajanja. Autor je koristio napajanje od 24 V 15 A. Što se tiče vozača, ovdje se već odabire pojedinačno, ovisno o snazi motora. Motorne zavojnice i njihovi polovi označeni su slovima A +, A-, B +, B-.

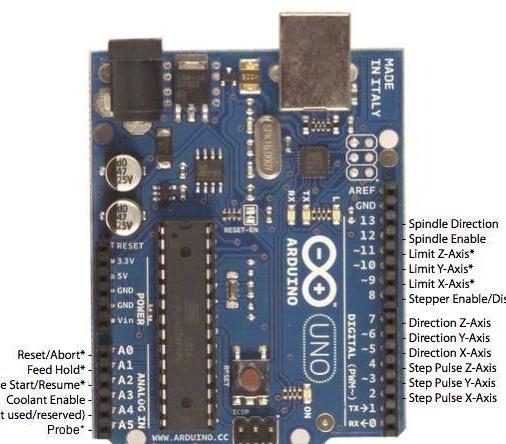



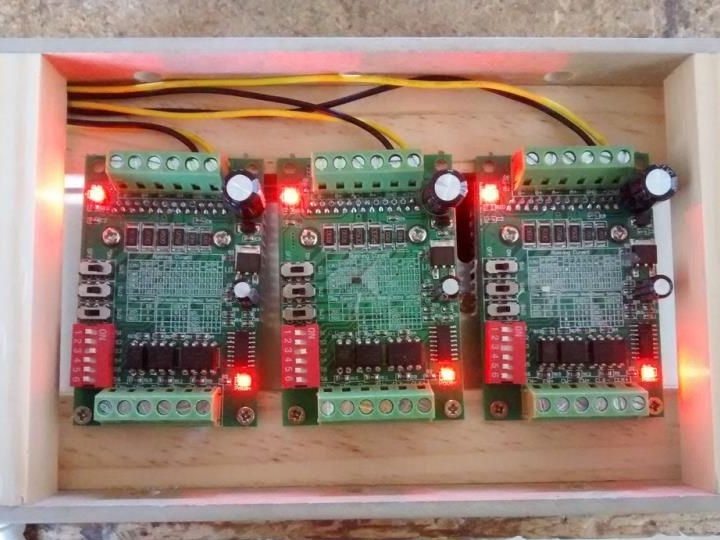


Izlaz CLK + mora biti spojen na pin pin na Arduino. CW + pin mora biti povezan s iglom za smjer. Pa, CLK- i CW moraju biti spojeni na GND pin. Kontakti EN + EN- ne koriste se.
Korak šesti Softverski dio uređaja
Sljedeći je korak preuzimanje softvera koji će kontrolirati stroj. Postupak nije kompliciran, kôd morate preuzeti pomoću programa XLoader na Arduino ploči. Nakon toga, trebate otvoriti GCodeSender da biste Arduino ploču povezali s osobnim računalom. Nakon toga ploča će biti spremna za kontrolu CNC stroja.
To je sve, stroj je spreman, možete ga testirati u praksi. Da biste postavili potrebne parametre za obradu objekta, morate koristiti sve crteže iz CAD programa. Tada se pomoću CAM programa generira oznaka G. U te je svrhe prikladno koristiti program MasterCam X7. Već ima i CAD i CAM.