


U ovom članku Čarobnjak će nam pokazati kako je napravio glumački helikopter Lego 60193 Arctic Air Transport model quadrocopter. Glavni zadatak u proizvodnji quadrocoptera, pored letećih kvaliteta, bio je spremiti što više originalnih dijelova.
Pogledajmo kratki videozapis koji pokazuje rad quadrocoptera.
Dakle, za izradu takvog kvadrokoptera majstor je koristio sljedeće
Alati i materijali:
-LEGO gradski arktički helikopter - 60193:
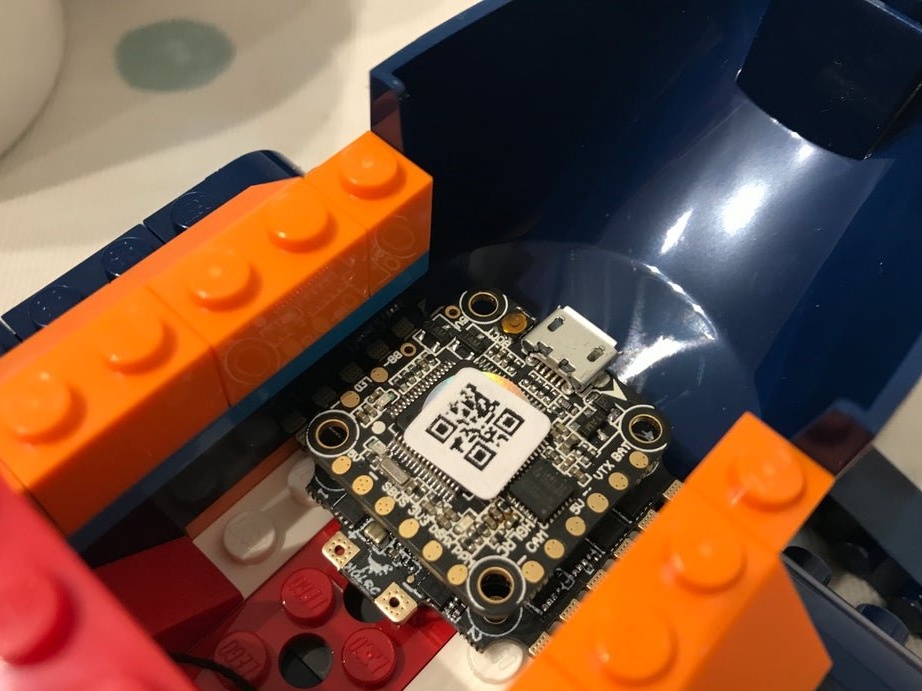
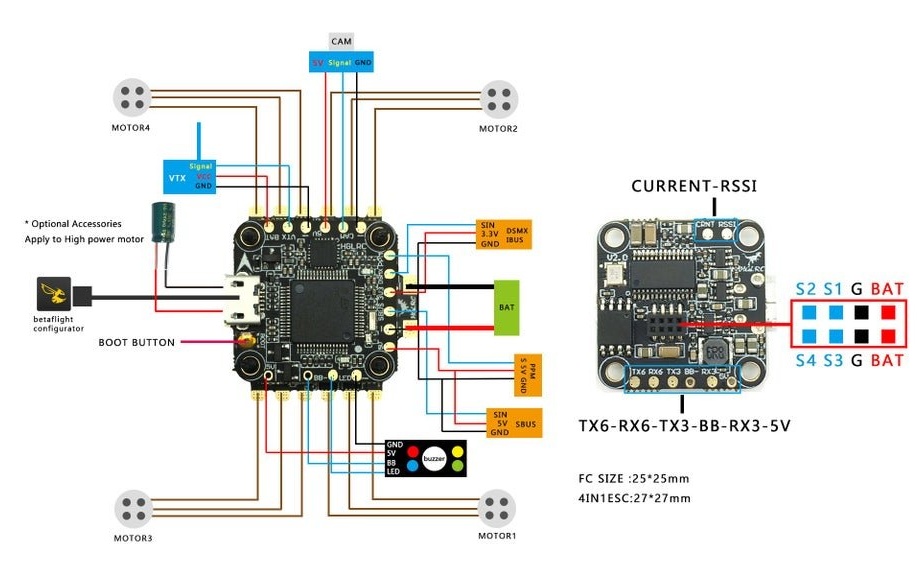
- Regulator i ESC 20x20 mm, na primjer, HGLRC XJB F428 Micro F4 AIO OSD;
- motori bez četkica - 4 kom;
-Propellery;
-Beterija 950 mAh;
-Razemy;
seeing-;
-Radio modul (odašiljač i prijemnik);
-Krepezh;
-Nozh;
-Poljedajuće željezo;
-Polje za ljepljenje;
- odvijač;
-Drel;
Prvi korak: Izrada Lega
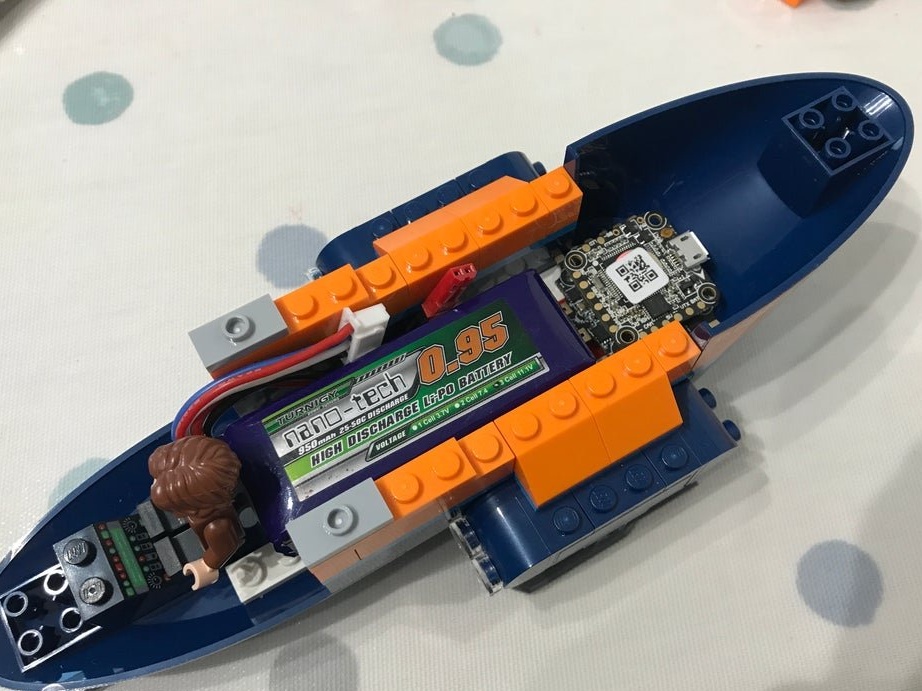
Prvo, majstor sakuplja LEGO-Arktik. Tada se model djelomično rastavlja. Unutra trebate postaviti bateriju i regulator, promatrajući uravnoteženje modela.


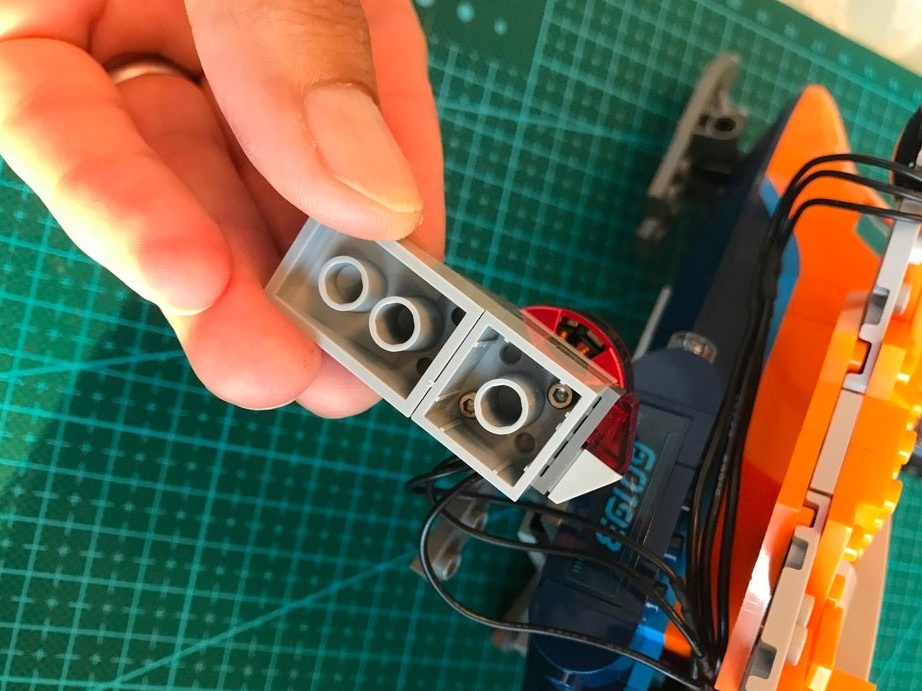
Drugi korak: nosač motora
Rupe za ugradnju za standardni motor bez četkica 1806 približno su iste kao i nosači na standardnoj LEGO 2x2 ploči. Svaki nosač motora na quadrocopteru ima 2x2 tamno sivu pločicu (LEGO 3022) i 2x2 svijetlosivu pločicu s okomitim zatičem (LEGO 2460), koji se obično drži na glavčinama propelera LEGO na vrhu.
Majstor buši rupe za montažu. Na motorima je u središtu plima. U sredini pločice izbušena je rupa ispod nje. Osigurava motore.








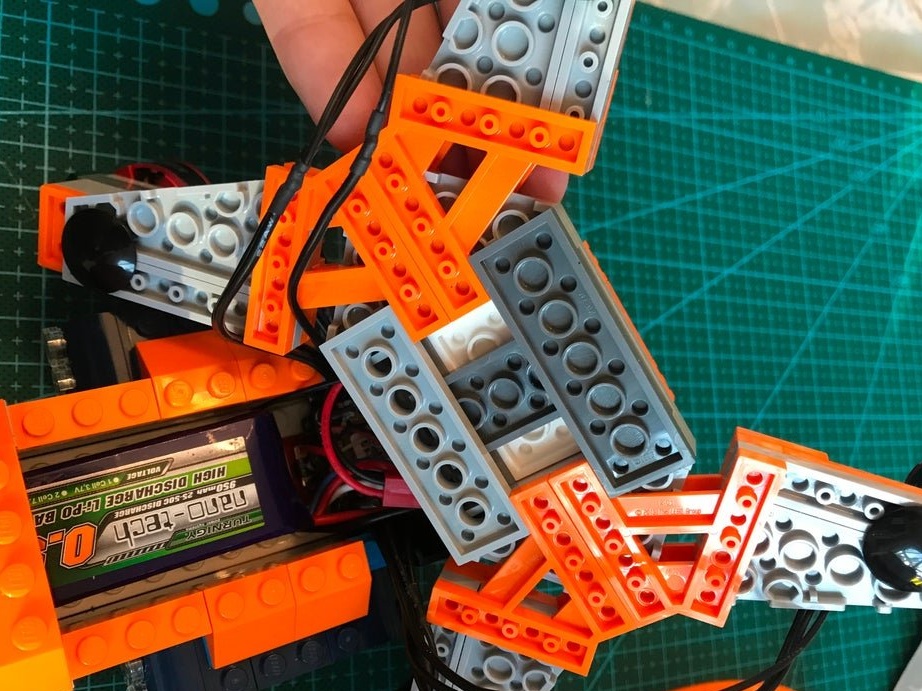
Treći korak: ramena
Rasporedivši „ramena“ quadrocopter-a, možete malo promijeniti izgled tako da osigurate širi ili uži raspored motora i položaj vijaka jedan prema drugom.
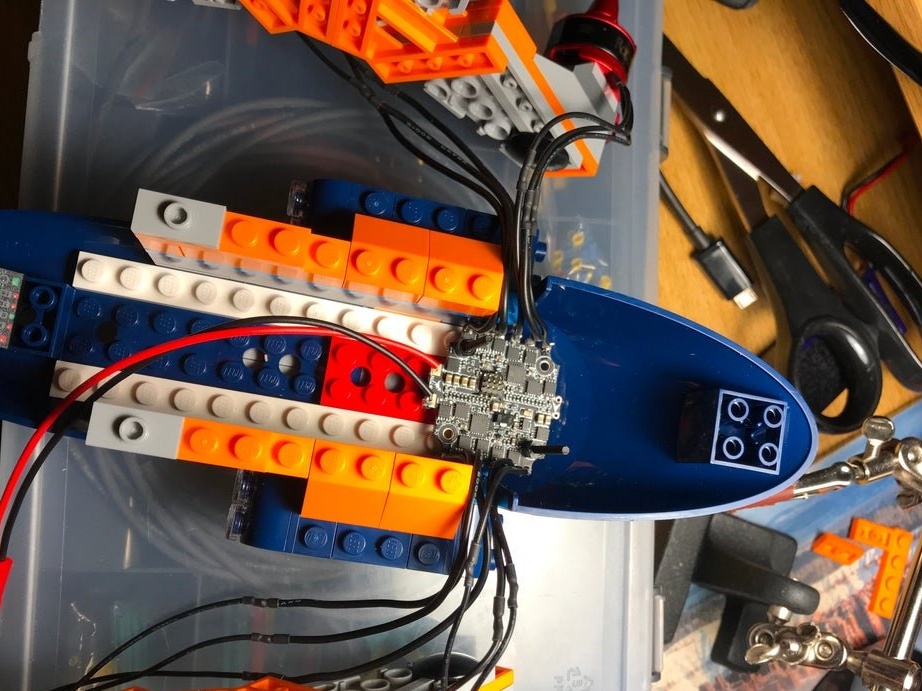
Standardni LEGO sklop (prva fotografija) ima "ramena" i motore smještene široko (vodoravno) s prilično velikim vijčanim preklapanjem. Majstor ponovno uspostavlja „ramena“ i baca motor, te prema tome, vijke.



Četvrti korak: elektronika
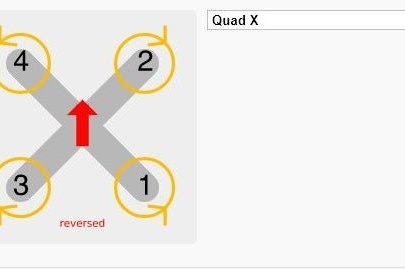
Prema shemi ugrađuje elektroniku. Prva fotografija prikazuje dijagram smjera rotacije motora. Smjer rotacije također se može promijeniti u fazi programiranja.

Nakon dovršetka instalacije i prije spajanja baterije čarobnjak provjerava veze kako ne bi došlo do puknuća ili kratkog spoja.
Kad uključite napajanje, trebali biste vidjeti lampice na kontroloru leta i nekoliko zvučnih signala s ESC-a.
Peti korak: Postavljanje
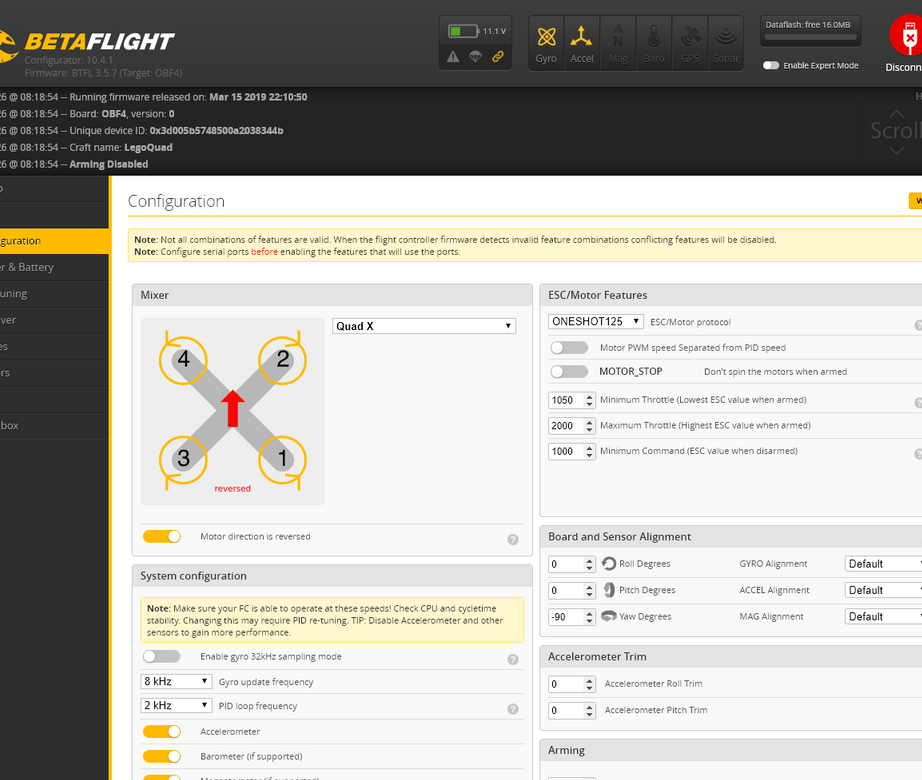
Sad kad je sve povezano, vrijeme je da konfigurirate regulator.To znači preuzimanje softvera (ugrađenog softvera) koji obavlja zadatak dekodiranja upravljačkih signala iz RC predajnika, obradu ulaznog signala senzora (akcelerator, žiroskopi) i pružanje kontrolnih signala za ESC da rotira motore u određenoj brzini.
Uklonite propelere radi sigurnosti! Prvih nekoliko koraka postavljanja nije potrebna baterija, samo USB napajanje.
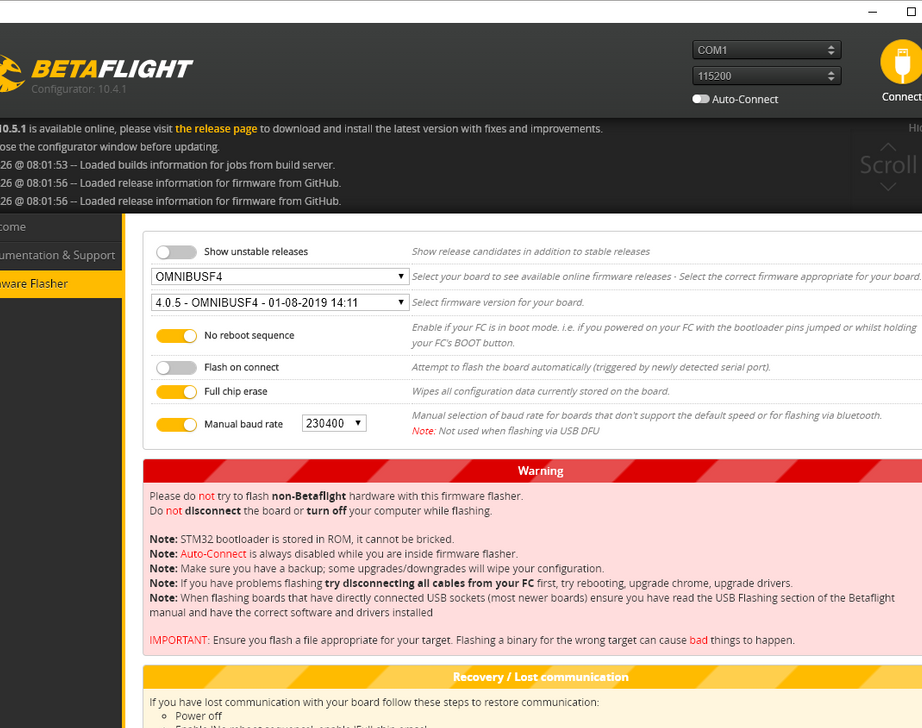
Preuzmite Beta konfigurator
Spojite mikro USB kabel na kontroler leta. Imajte na umu da je ovo možda jednostavnije učiniti ako regulator nije navučen na kućište.
Preuzmite i prenesite odgovarajući firmver za kontrolora leta.
betaflight-settings-legoquad.txt
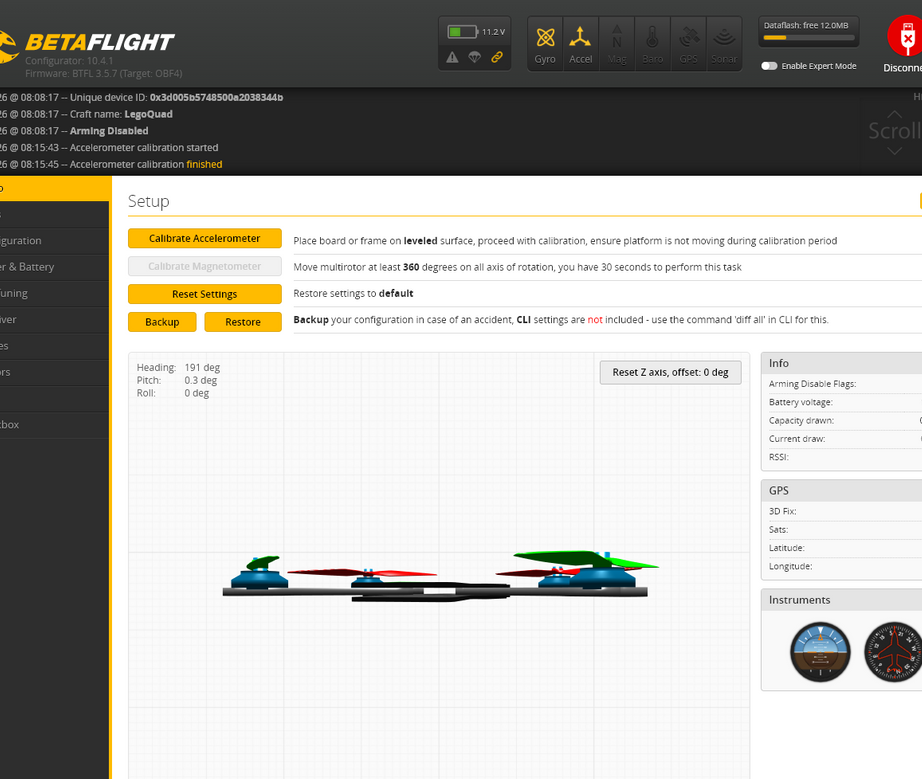
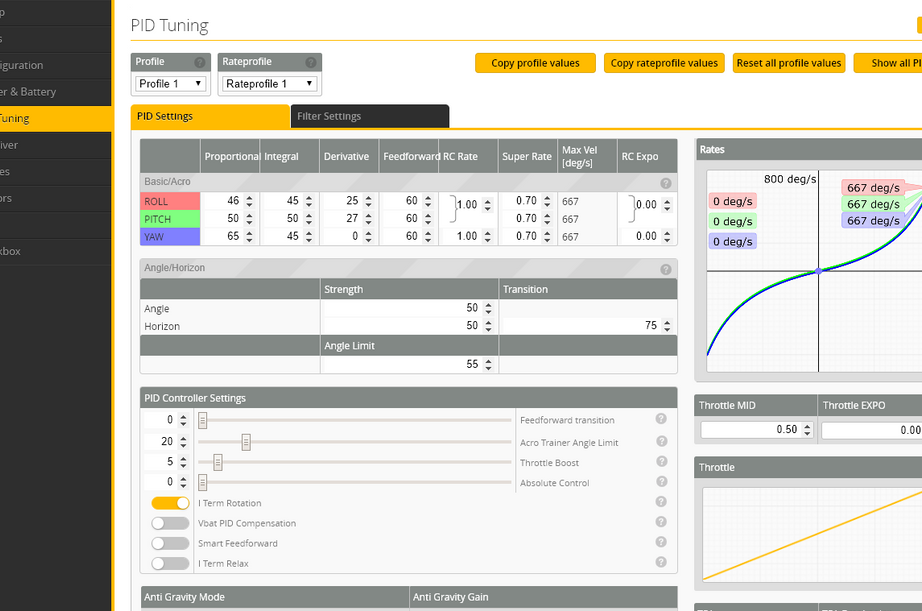
Kliknite gumb "Poveži" i konfigurirajte sljedeće postavke:
1. Postavljanje - kalibracija modela motora
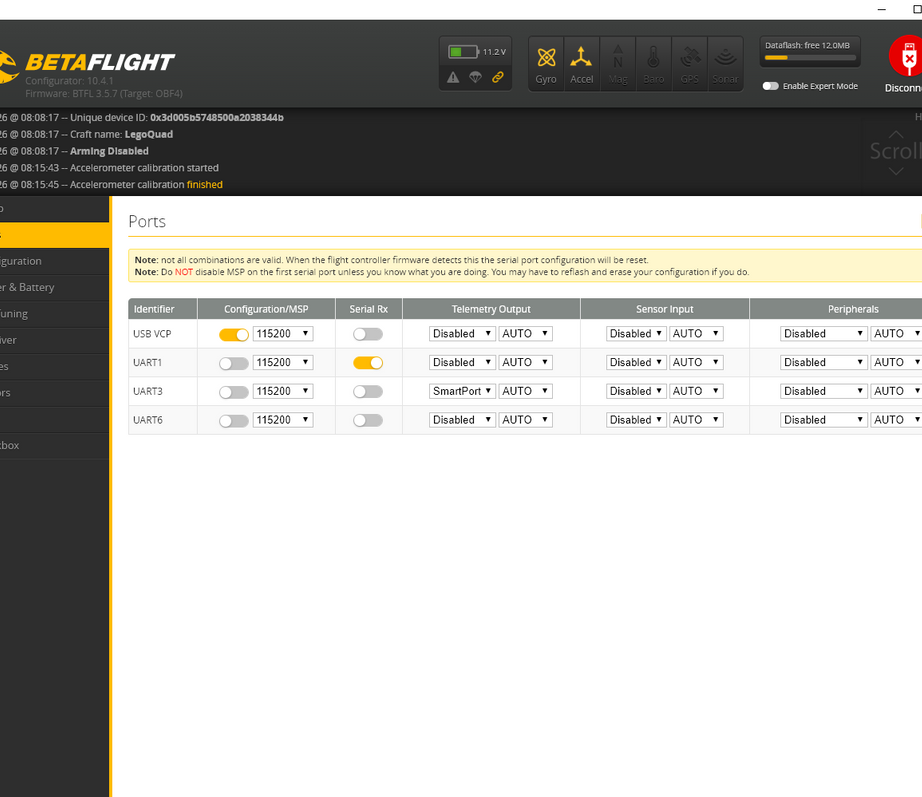
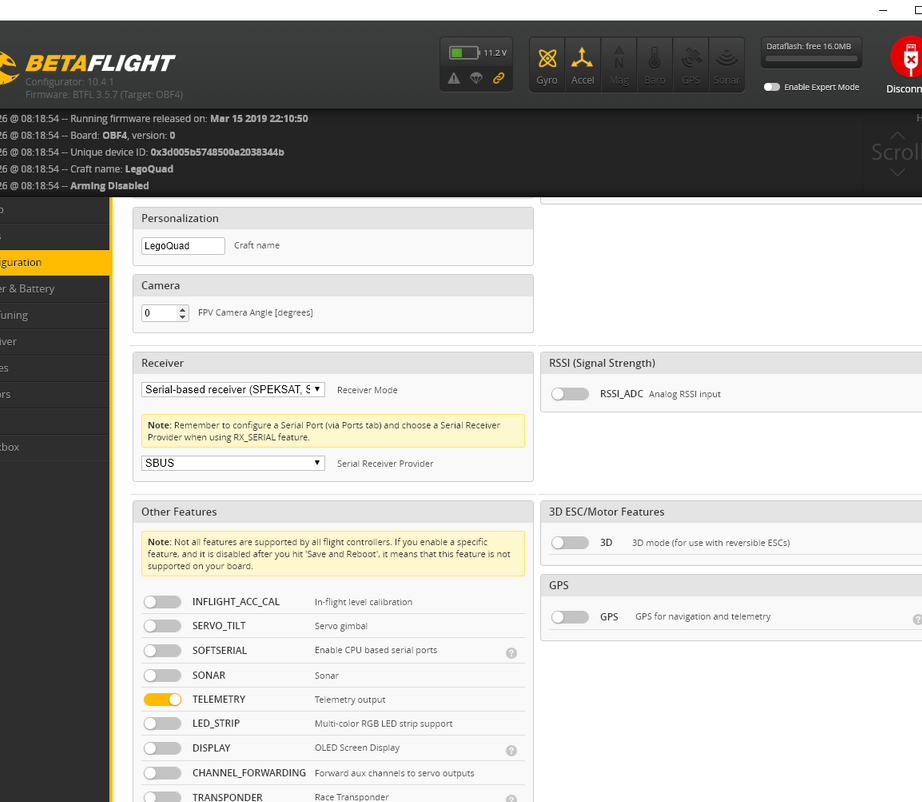
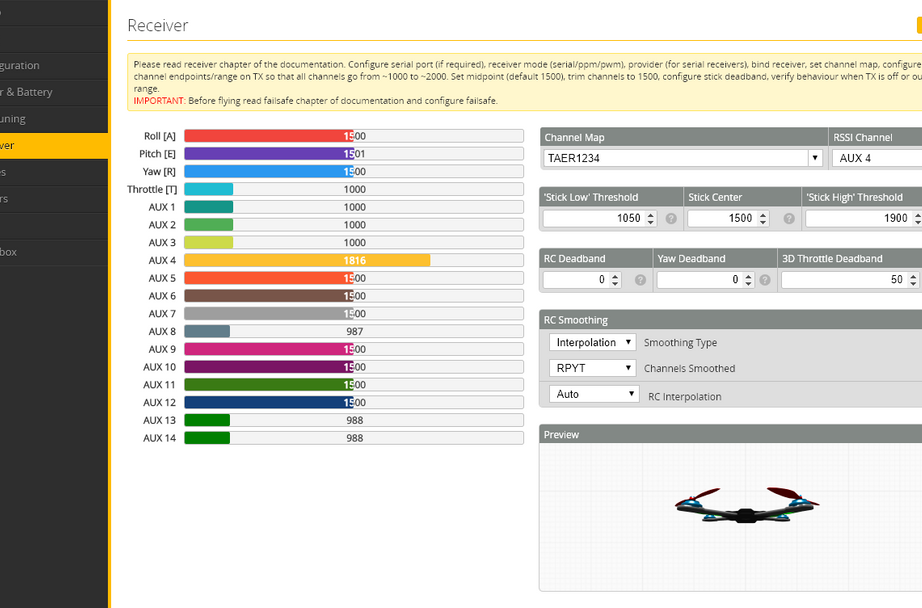
2. Navedite portove - UART1 - Serijski RX za spajanje SBUS RC prijemnika
3. Spremanje i ponovno podizanje sustava
4. Uspostavite vezu između prijemnika i odašiljača
5. Preopterećenje
6. Vrijednost za PID master postavljena je na 250
7 Priključite bateriju
8. Podesite napon.
9. Provjerite jesu li zaslon vašeg kanala i smjer upravljanja ispravni, kad je sve postavljeno, slika modela quadcopter u donjem desnom kutu trebala bi se kretati u svim ispravnim smjerovima prilikom pomicanja džojstika na RC kontroleru.
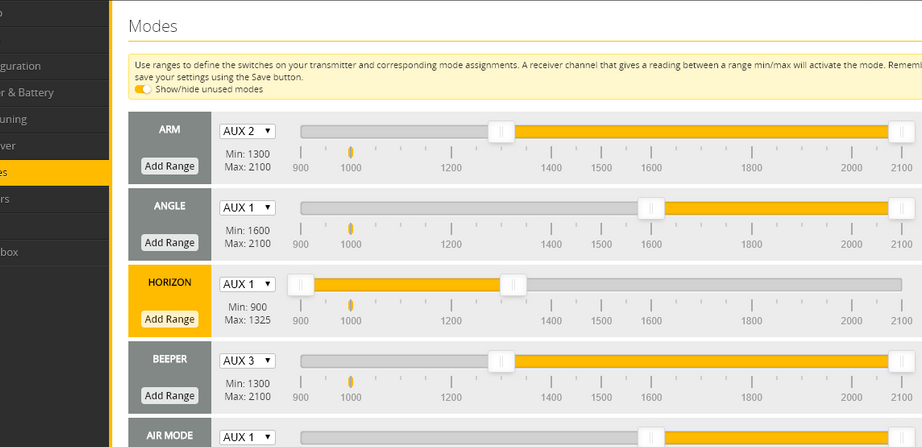
Konfigurira načine.
ARM uključeno / isključeno
HORIZON samonivelirajući / ACRO za tradicionalni FPV let
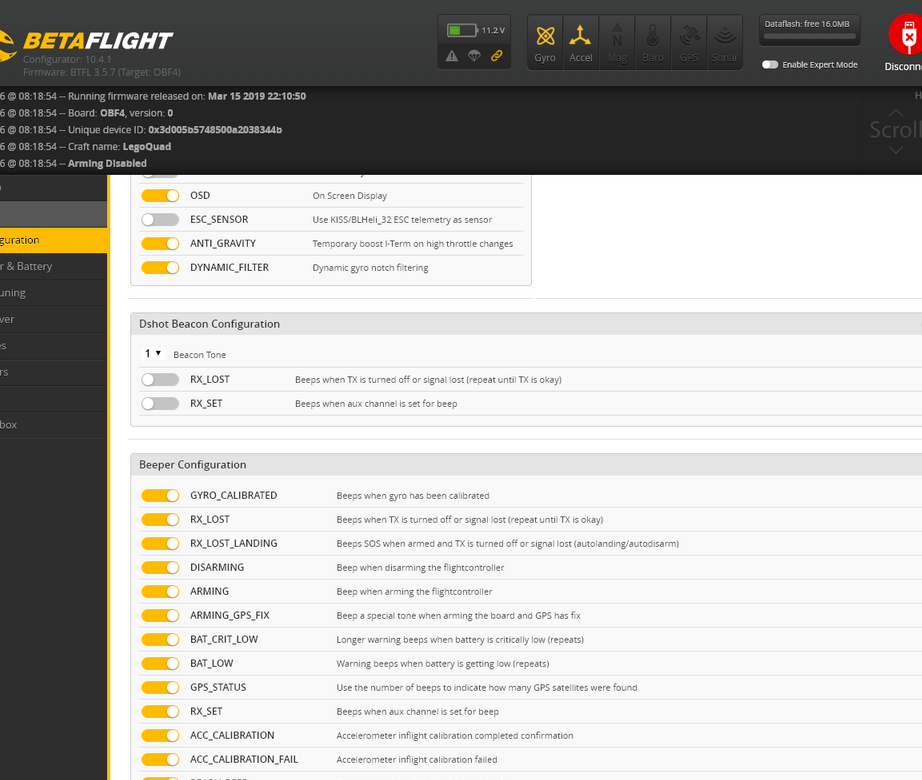
BEEPER - Korisno ako model izgubite u visokoj travi ili grmlju.
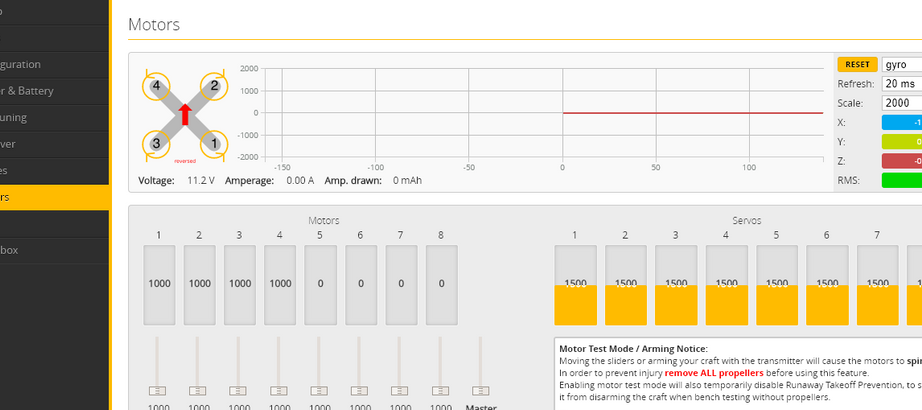
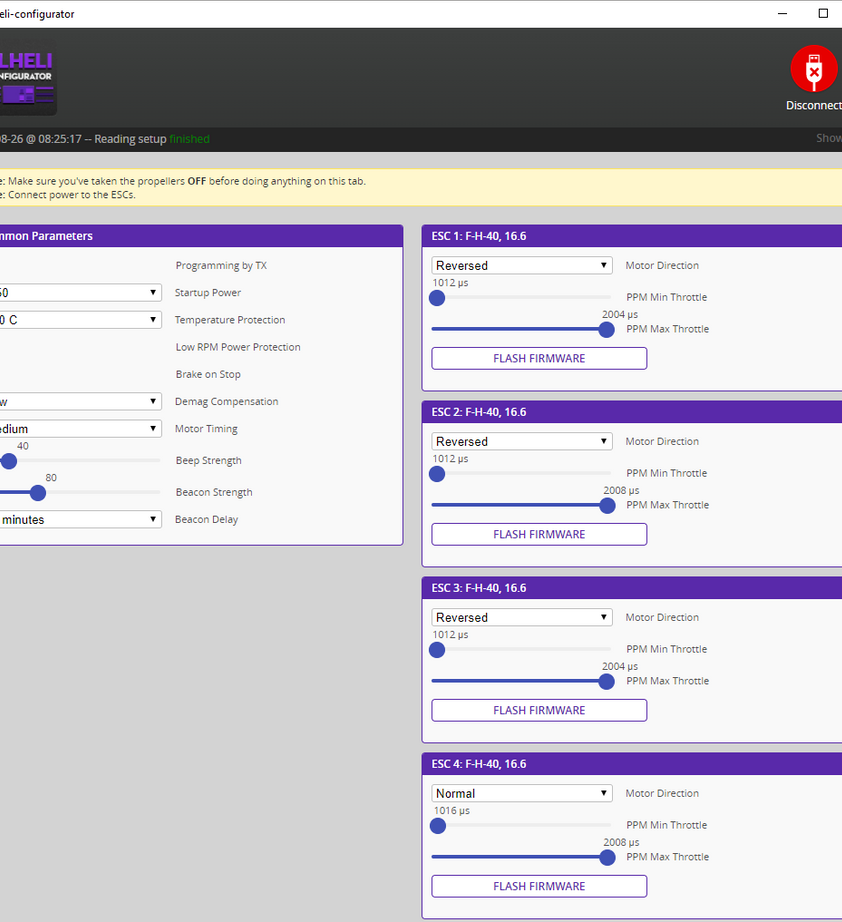
Kartica "Motori" - pomoću ove opcije provjerite svaki motor zasebno, i što je još važnije, označite smjer vrtnje svakog od njih
Ispravite bilo koji pogrešan smjer rotacije s BLHELI konfiguratorom
Nakon svih ovih koraka možete iskopčati USB i bateriju, a zatim uključiti napajanje i provjeriti da li sve radi:
Uključite predajnik i napajanje
Spojite bateriju i montirajte quadrocopter na ravnu površinu
Uključite ARM prekidač i motori bi se trebali vrtjeti niskom brzinom.
Provjerite leptir za gas dok povećavate brzinu
U vodoravnom načinu rada pokušajte nagnuti quadrocopter i osigurajte da motori odgovarajuće reagiraju, na primjer, nagnite ga prema naprijed, a prednji motori će se ubrzati.

Korak šesti: Završna skupština
Gotovo cjelokupna struktura kućišta drži se bravama za ugradnju. Majstor koristi samo ljepilo za topljenje za ugradnju motora.
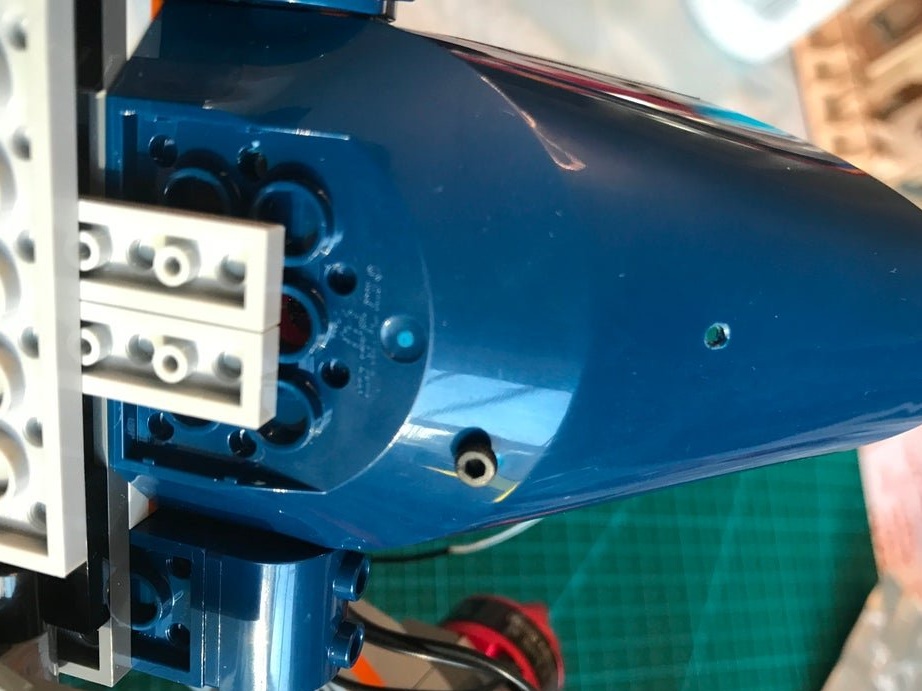


Sve je spremno i možete testirati.



