

takva robot već je stvorena i zove se DIY: LightBot. Štoviše, svi ga mogu prikupiti, svi elementi za stvaranje lako se mogu naći, a robot će biti prilično jednostavan. Ova vrsta robota stalno će ići za vlasnikom u mraku i istaknuti ga na pravom mjestu, što eliminira potrebu držanja svjetiljke u ruci. Vlasnik će nadgledati robota zahvaljujući infracrvenom senzoru koji je priključen na vlasnikovo stopalo.
Materijali i alati za izradu robota:
1. Infracrvena svjetla. Takav će se uređaj sastojati od četiri infracrvena LED-a, mogu se naći na daljinskom upravljaču s televizora.
2. Dva kotača iz kompleta K'nexa ili dječjih igračaka.
3. Dva mala motora (mogu se naći u dječjim igračkama).
4. Dva infracrvena tranzistora kao što su NPN ili fotoresistor. Infracrvene fototransistore nije teško kupiti.
5. Tri AA baterije i jedna 9 Volta.
6. PVC cijev.
7. Vruće ljepilo.
8. Jednokratna plastična vilica.
Proces proizvodnje robota:
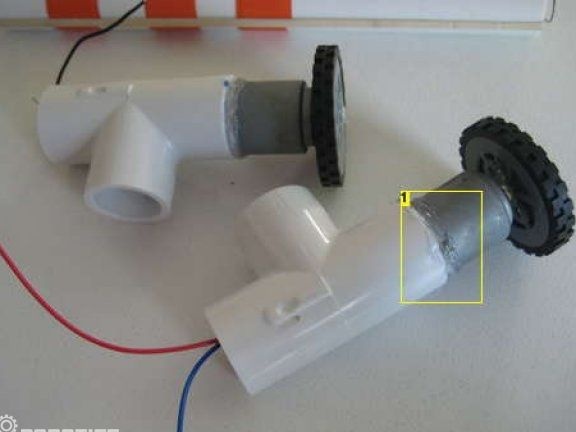
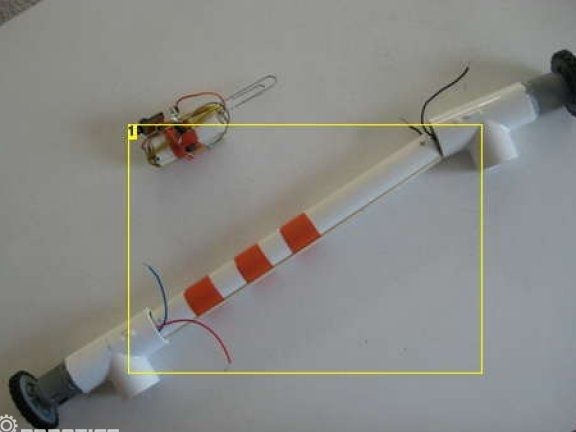
Prvi korak. Ugradnja motora
Prvo morate instalirati motore. Za njihovu ugradnju koriste se plastične "čajnice", koje se stavljaju na glavnu cijev. Motori su pričvršćeni vrućim ljepilom. Ovdje nije potrebno žalostiti ljepilo. U ovoj se fazi kotači mogu postaviti na osovinu motora. Tako da se čvrsto drže, mogu se učvrstiti i ljepilom vrućim otapanjem.
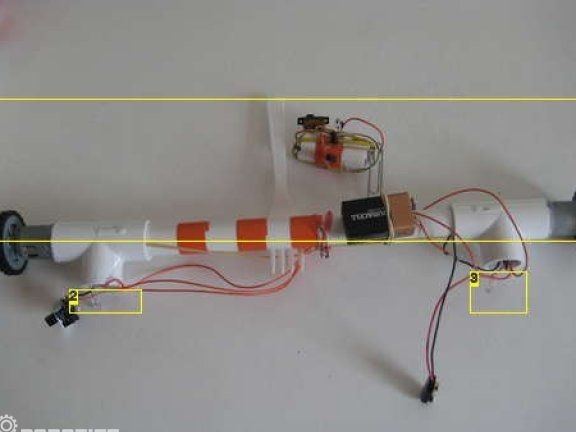
Drugi korak Ugradnja fotoreportera
Fotoresisti su potrebni kako bi se pratili infracrveni svjetlosni signal. Oni će biti svojevrsne oči robota. Ovisno o smjeru u kojem će se svjetlost gasiti, robot će ubrzati jedan od motora kako bi se okrenuo u pravom smjeru.
Svjetlosni otpornici pričvršćeni su na "čahure" na mjestima koja su označena brojevima 2 i 3. Na tim se pozicijama mogu učvrstiti ljepilom s tri štapa.
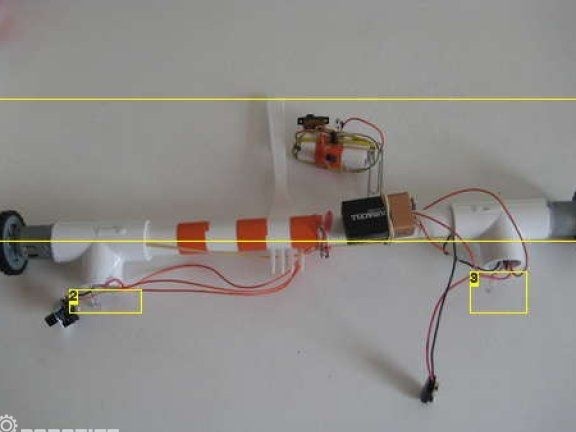
Treći korak Instalacija napajanja
Ukupno, robot radi na dva izvora energije. To su tri AA baterije i jedna 9 Volt baterija. Što se tiče baterija za prste, oni su ugrađeni unutar cijevi.Pa, na slušalicu je izvana pričvršćena baterija tipa "Krona".
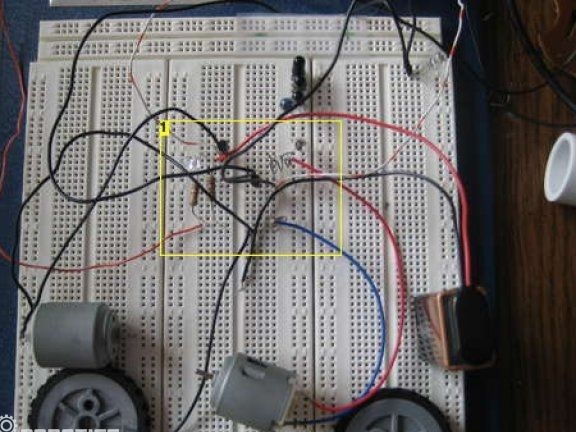
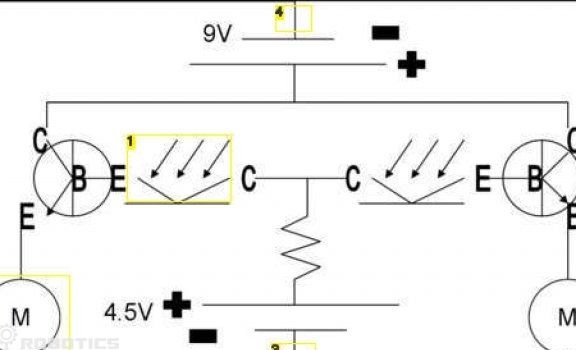
Četvrti korak Krug robota
Shema je dizajnirana na takav način da ako robot vidi zračenje s jedne strane, tada ubrzava motor s suprotne strane, pa se robot okreće. Željena brzina motora postiže se eksperimentalnom zamjenom otpornika.
Drugi se krug može nadopuniti prekidačem. Mora biti instaliran na takav način da prekida napajanje robota.
U dijagramu broj 1 označava fototransistor, 2 - regulator motora, 3 - mjesto za ugradnju sklopke, 4 - ovdje možete staviti i prekidač.
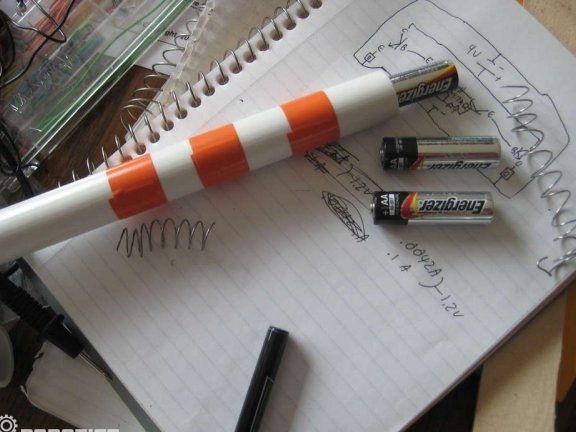
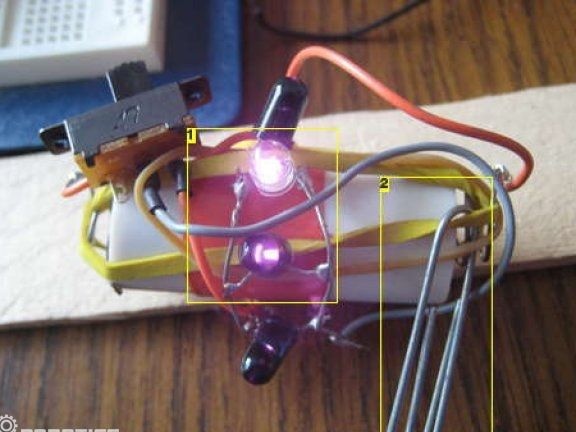
Peti korak Izradite IR Beacon
Za stvaranje infracrvenog svjetla uzima se kratka polivinilkloridna cijev u koju je ugrađena jedna AA baterija. Kontakti se održavaju zahvaljujući elastičnom pojasu, a napajanjem četiri infracrvene diode upravlja se prekidačem. Nemoguće je vidjeti takvu svjetlost očima, kako bi se provjerila operativnost dioda koje su potrebne za gledanje preko digitalnog fotoaparata. Svjetionik je pričvršćen običnom kopčom za papir na nogu.
Korak šesti Završna faza montaže robota
Sada sve treba povezati kako je naznačeno na dijagramu. Mehanički dio također treba sastaviti, najviše pažnje treba posvetiti fotoresistorima, moraju se isticati, jer u protivnom neće moći pokupiti signal svjetionika. Sada, uključivši robota, trebate ga prošetati i vidjeti što će mu napraviti.
Naravno, robot možda neće otići nakon vlasnika prvi put, ali ne biste trebali očajavati, jer se krug može mijenjati i robot konfigurirati po potrebi. Prema autoru, u budućnosti se na robota može instalirati softver zahvaljujući kojem će prepoznati predmete i ljude. Također možete instalirati mnogo različitih senzora i ovaj robot učiniti visokotehnološkim uređajem.