

Pultoidi se nazivaju takvim robotima kojima se može upravljati na daljinu pomoću daljinskog upravljača. Na primjer, u te svrhe može se koristiti daljinski upravljač televizora. Glavni zadatak koji se autor postavio u izradi takvog robota je jednostavnost njegovog sastavljanja. razmatrati robot ne zahtijeva izradu tiskanih pločica, instalacija je vrlo jednostavna i događa se samo na kartonu.

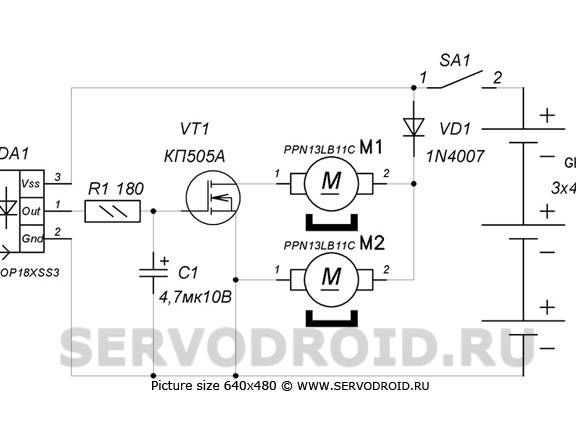
elektronički Krug robota sastoji se od samo četiri komponente: dioda, tranzistor, fotodetektor i kondenzator. Za proizvodnju mehaničkog dijela trebat će i najmanje materijala, na primjer, za izradu kućišta koristi se CD-ROM.
Robot napravljen na ovaj način razumjet će samo jedan tim. Vrijedno je pritisnuti bilo koji gumb na upravljačkoj ploči i robot će se početi okretati. Ako nastavite držati tipku, kut rotacije postat će veći, što će rezultirati time da se robot može okrenuti za 360 stupnjeva.
Uređaj robota
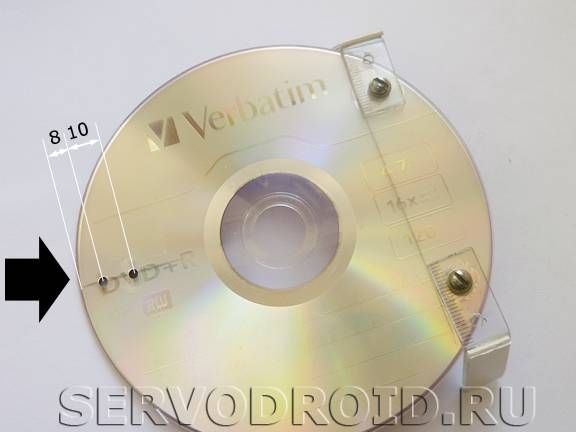
Kompaktni disk koristi se kao osnova za izradu robota. Što se tiče elemenata napajanja, oni su pričvršćeni pomoću M2 vijaka. Elektronska ploča, također i odjeljak za baterije, pričvršćena je pomoću trake.
A što se motora tiče, oni se nalaze pod kutom, a osovine su naslonjene na cestu. Dakle, ne treba posebno proizvoditi kotače. Vijci se pričvršćuju pomoću okvira koji su izrađeni od školske linije.
Tri baterije "malog prsta" hrane robota, a ugrađuju se u poseban kofer. Ukupno napajanje proizvodi 4,5 V.
I na kraju, fotodetektor, ovdje je samo jedan, to je vrsta TSOP-a. On prima modulirane signale s bilo kojeg daljinskog upravljača, zahvaljujući kojem se robom može upravljati.
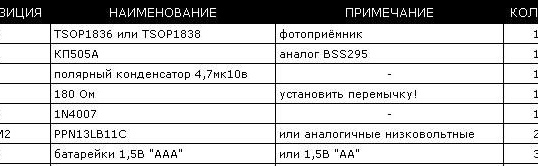
Materijali i alati za izradu:
- najlonske kravate;
- fotodetektor tipa TSOP1836;
- jedan tranzistor s efektom polja (KP505A);
- kompaktni disk;
- fular za baterije u tri dijela;
- tri "male" baterije;
- plastični vladar;
- vijci za pričvršćivanje okvira;
- žice i sklopke (prelazeći tip).
Proces proizvodnje:
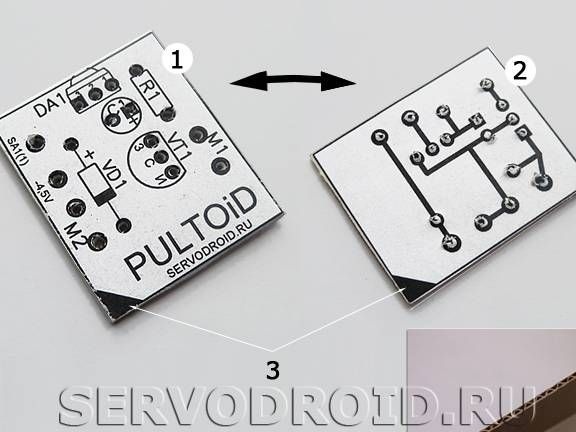
Prvi korak. Dizajn PCB
Da biste napravili ploču s tiskanim krugom, prvo morate ispisati crtež na papir. Na jednom instalacijskom crtežu i na drugoj strani ploče trebali biste dobiti dvije slike. Ukupno će se ploča sastojati od tri elementa, u sredini će biti valoviti karton s obje strane zalijepljen uredskim papirom. Za lijepljenje ploče preporuča se korištenje suhog ljepljivog štapa.
Drugi korak Ugradnja radijskih komponenti
Prilikom instaliranja elektroničkih komponenti važno je ne zaboraviti ili odrezati izbočene rubove kontakata. Nakon toga oni će se saviti, pa će se stvoriti električni krug. Svi su elementi povezani lemljenjem prema navedenoj shemi.
Otpornik R1 u krugu mora biti zamijenjen bilo kojim skakačem. Što se tiče fotodetektora, na fotografiji je također prikazan ispravan redoslijed njegovog spajanja.

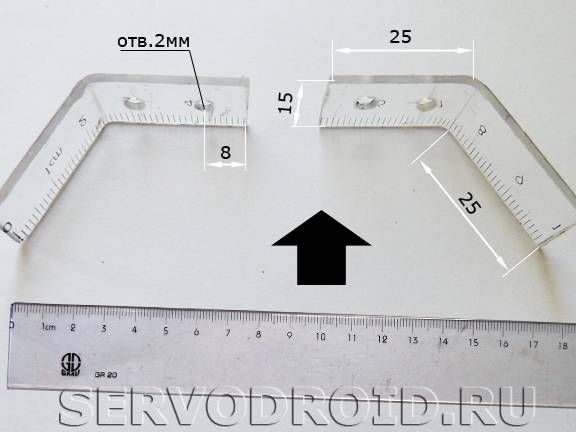
Treći korak Instalacija strujnog okvira
Da biste instalirali motore, morat ćete stvoriti okvir napajanja. Kao materijal ovdje će se koristiti plastični školski vladar. Mora biti izrezan na dva dijela i savijen kao što je naznačeno na fotografiji. Da bi se vladar počeo savijati, morate vrh vrućeg lemilice donijeti na udaljenosti od oko 2 mm do mjesta progiba. Također u ove svrhe možete koristiti građevinski sušilo za kosu. Vladar treba glatko saviti pod kutom od oko 30 stupnjeva.

Nakon što je okvir stvoren, možete nastaviti s njegovom ugradnjom. Da biste to učinili, uzmite CD i 2 mm vijke s maticama. Nadalje, na pravim mjestima se buše rupe promjera najmanje dva milimetra, a okvir se pričvršćuje vijcima. Kako se okvir ne bi poskliznuo, prije nego što ga instalirate trebate nalijepiti dvostranu traku na disk.
Četvrti korak Ugradnja prednjeg nosača
U prednjem dijelu diska potrebno je izbušiti dvije rupe i pripremiti najlonski estrih. Veličina estriha treba biti 3x150 mm. Mora biti umetnut kako je naznačeno na fotografiji. Kao rezultat, rezultirajuća podrška će se savršeno amortizirati tijekom rada robota i klizne po cesti.


Peti korak Ugradnja motora
Kako bi se spriječilo da klizne osovine motora kliznu po cesti, na njih moraju biti postavljeni zaštitnici. Izrađene su od gume koja se može naći na pastama helijskih olovaka. Da biste instalirali motore, prvo morate zalijepiti komad obostrane trake na nosač, to će spriječiti klizanje. Pa, onda su motori konačno fiksirani najlonskim vezicama.

Korak šesti Prekidač i priključak za napajanje
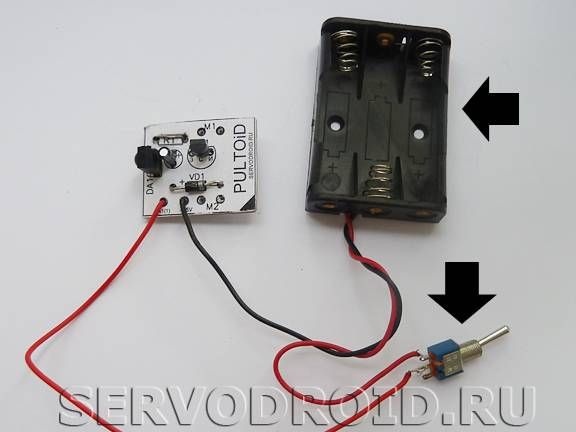
Kao izvor napajanja možete koristiti bilo koju bateriju čija struja ne prelazi 5 volti. U ovom slučaju koristi se kućište za baterije s tri prsta, kojih ukupno ima 4,5 V.
Što se tiče sklopke, ona je montirana na razmaku pozitivnog kontakta koji dolazi iz izvora napajanja. Crvena žica pričvršćena je na ploču da pričvrsti SA1 (1), a crna žica za nožicu -4,5V.


Također u ovoj fazi možete spojiti motore, njihove su žice spojene na kontakte M1 i M2.
Sedmi korak. Završna faza
U završnoj fazi trebaju se popraviti svi elektronički elementi. Pričvršćeni su na disk pomoću dvostrane trake. Što se tiče prekidača, također ga treba popraviti, za to možete koristiti vruće ljepilo.

To je sve, sada je robot spreman. Možete je pokušati uključiti i dati naredbu za okretanje bilo kojim daljinskim upravljačem.