
Posebnost robota BIBOT-1 je ta što može obavljati dva zadatka. Može se kretati iza izvora svjetlosti ili crnom crtom koja se može nacrtati na papiru. Robot vrlo fleksibilan u postavkama, to će kasnije biti moguće prilagoditi bilo kojim željenim uvjetima, odnosno učiniti ga osjetljivijim na svjetlost ili manje. Također je moguće prilagoditi brzinu rotacije motora, što će omogućiti robu da bolje funkcionira, posebno kada se kreće duž linije.

Uređaj i princip robota:
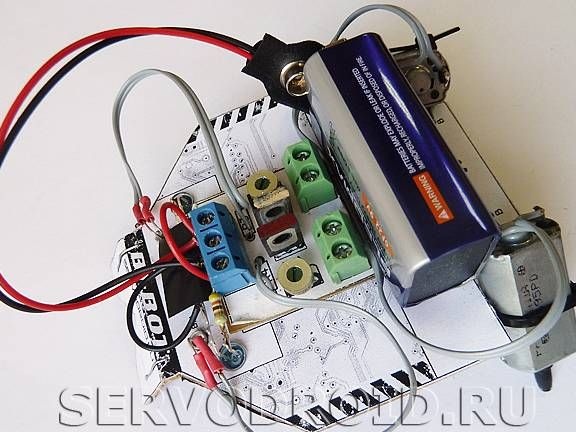
Baza robota izrađena je od kartona, dok se predložak ispisuje na pisaču, a zatim se ruši. Što se tiče modula radio komponenti, tekstolit je uzet kao osnova, modul je pričvršćen na bazu robota. Da bi tijelo bilo ukočeno, u dizajnu se koriste posebna rebra.
Motori su instalirani kao u većini ovih DIY, odnosno pod kutom. Zbog toga nema potrebe stavljati kotače i mjenjač. Kako bi spriječili klizanje osovina po površini, na njih se postavljaju zaštitnici.
Kao izvor napajanja koristi se baterija od 9 V tipa 6F22. Baterija je pričvršćena vrpcom i uvijek je dostupna za jednostavnu zamjenu.
Što se tiče prekidača, onda automobili odlučio je izbjeći ga instalirati. Robot se uključuje i isključuje manipuliranjem kopčom koja se pričvršćuje na bateriju.
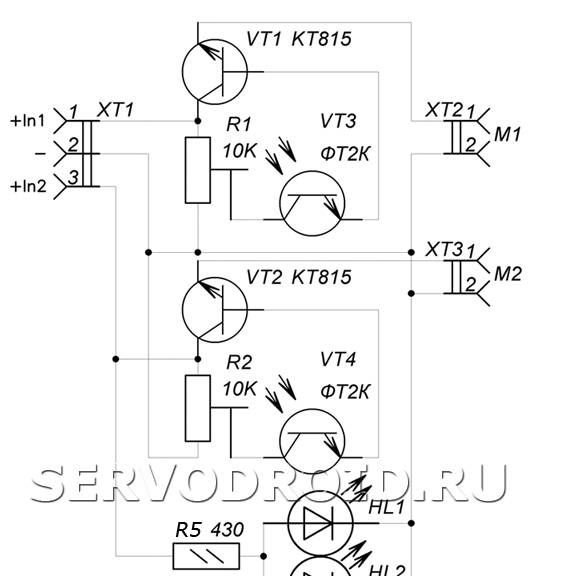
I na kraju, prilagodba robota. Za podešavanje osjetljivosti robota, sustav ima dva otpornika za podešavanje. Kad se okreću, možete prilagoditi osjetljivost robota na svjetlost, a također možete prilagoditi brzinu rotacije motora. Što je robot osjetljiviji na svjetlost, brže će se kretati i obrnuto.
Što se tiče principa rada, sve je postavljeno u dijagramu.
Materijali i alati:
- 9V baterija i spajalica za spajanje;
- dva priključka za povezivanje motora (dvocijevni terminalni blokovi);
- motori;
- najlonski estrih;
- zaštitnik (gumeni valjak);
- dva fototransistatora;
- dvije infracrvene LED;
- nosač od spenjača;
- trostruki priključni blok za priključak napajanja;
- podešavanje otpornika.

Proces proizvodnje:
Prvi korak. Dizajn PCB
Naknada se stvara metodom LUT. Prije rada površina stakloplastike mora se temeljito očistiti, a zatim oprati i temeljito osušiti. Nakon proizvodnje, vodljivi tragovi moraju se provjeriti multimeterom za kratki spoj.
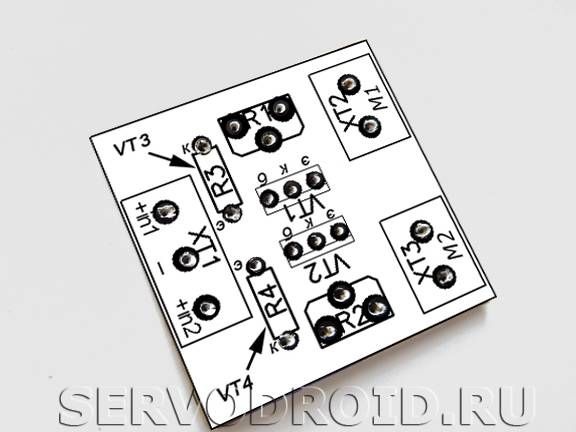
Drugi korak instalacija elektronički element
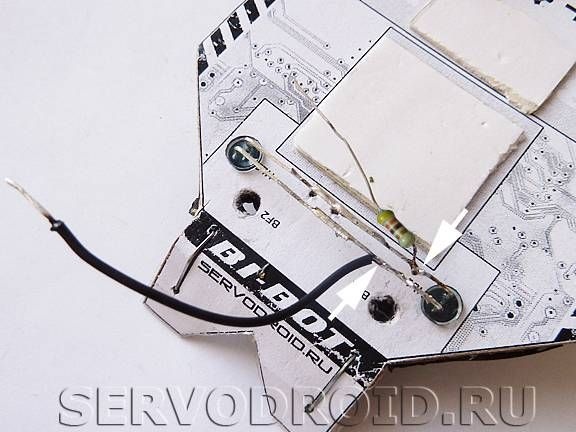
Zatim trebate uzeti crtež ispisan na papiru i zalijepiti ga na stvorenu ploču. U ovom se slučaju rupe na papiru i na PCB-u moraju točno podudarati. Zatim se instaliraju radio komponente kako je prikazano na dijagramu. U procesu rada, ugradnja otpornika R3, R4 treba instalirati fototransistore VT3, VT4.
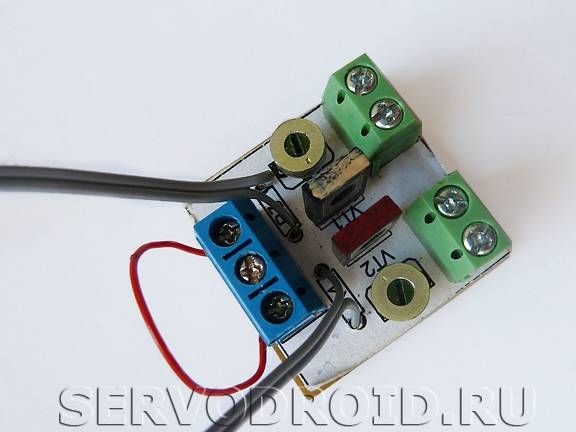
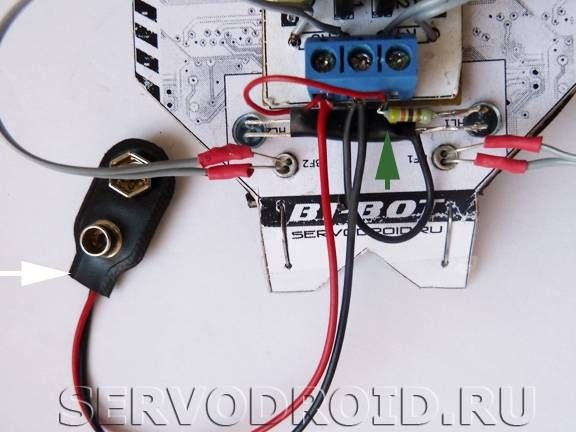
Ekstremni dijelovi terminalnog bloka XT1 u tri sekcije moraju biti povezani pričvrsnom žicom. Točke spajanja kontakata moraju biti dobro izolirane, najbolje je koristiti toplotnu steznu cijev za ove svrhe.
Treći korak Kako stvoriti slučaj
Crtež tijela mora biti ispisan na običnom listu papira A4. Dalje, morate uzeti komad valovitog kartona i na njega zalijepiti crtež, nakon toga slučaj mora biti izrezan po obodu.
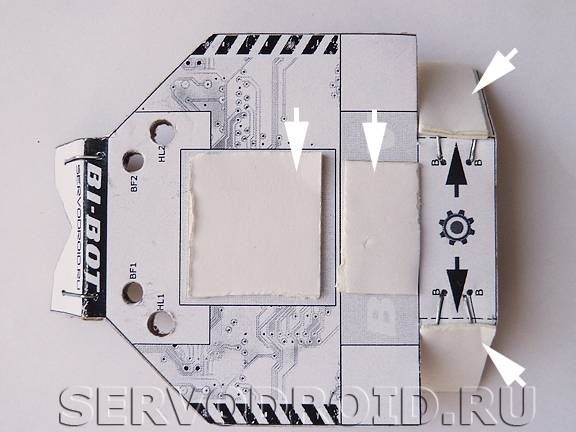
Tamo gdje je piktogram "škare" smješten smjelim i podebljanim linijama, treba napraviti rezove. Nakon toga, duž crnih isprekidanih crta, morate saviti karton kao na fotografiji i staviti crne strelice.



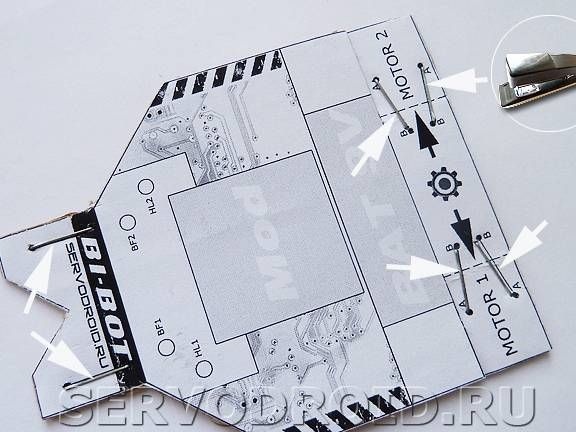


Prednji i stražnji dio kućišta do određenog položaja pomoću spenjača, morate instalirati nosače. Mjesta njihove instalacije označena su crnim linijama s krugovima. Potrebne su spajalice kako bi okvir bio čvršći. Nakon ugradnje nosača, oni su zamorni da se savijaju duž linija presavijanja.
Na mjestima označenim BF1, BF2, morate napraviti rupe za ugradnju fototransistatora. Na mjestima HL1, HL2 morate napraviti rupe takve veličine da odgovaraju promjeru kućišta infracrvenih LED.
Na mjesta označena kao Mod "," BAT 9V "i" MOTOR 1 "," MOTOR 2 "nalijepite trake dvostrane trake.
Četvrti korak Ugradnja motora
Motori su ugrađeni u najlonskim vezicama. Da se osovine ne bi skliznule, moraju se nositi sa štitnicima. Izrađene su od gumenih traka, koje se nalaze u helijskim šipkama olovaka. U istoj fazi lemite žice za motore.


Peti korak Ugradnja infracrvenih LED
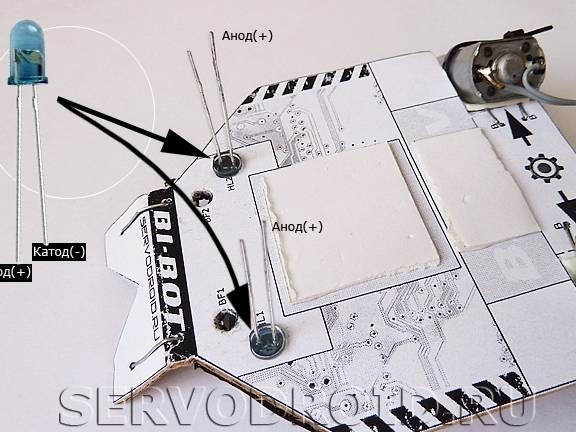
Kada instalirate infracrvene LED-ove, važno je ne zbuniti njihove zaključke, za uvezene elemente dugi je kontakt anoda, to jest plus. LED se ugrađuju na položajima HL1, HL2 kao što je prikazano na fotografiji. Nalazi su savijeni tako da se diode mogu spojiti paralelno.
Otpor od 430 ohma mora biti lemljen na pozitivan kontakt LED-ova, a crna žica na negativni kontakt.
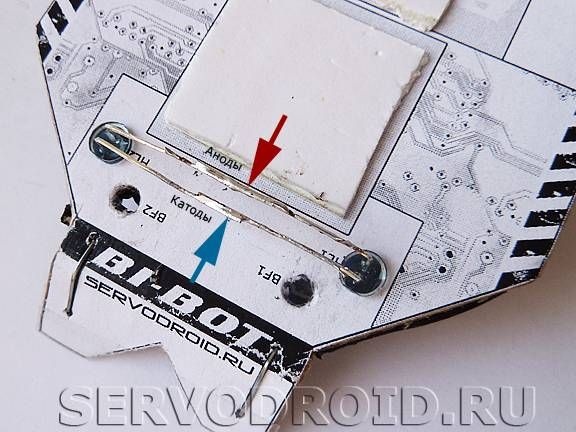
Drugi kraj crne žice mora biti povezan sa središnjim iglom trokatnog terminalnog bloka. Što se tiče izlaza otpornika, on je spojen na stezaljku terminalnog bloka.
Korak šesti Završna faza izrade
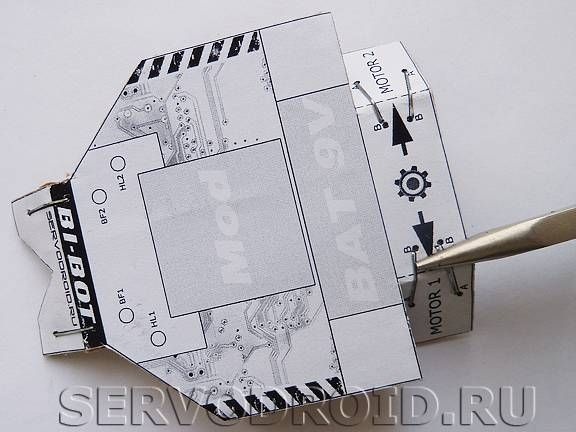
Da bi se robot kretao duž linije, fototransistori se postavljaju na mjesto BF1, BF2 kao na fotografiji.
Tranzistori za kretanje iza izvora svjetlosti postavljeni su na stražnju stranu.
Zaključno, motori su spojeni i baterija je stavljena.


To je sve, robot je spreman. Sada ga možete pokušati uključiti i konfigurirati na potrebne uvjete.