

U videu možete vidjeti kako radi robot. Postupno mijenja boju tijekom rada.

Materijali i alati za sastavljanje robota:
- nosači za ugradnju u obliku slova U;
- četiri 1,5V LR44 baterije svaka;
- višebojni RGB-LED s funkcijom prebacivanja;
- izolacijske cijevi;
- čelični zavrtanj;
- niskonaponski motor tipa RF-300CA;
- gumb za uključivanje robota (s dva vodiča);
- žice za spajanje motora;
- treperi LED alarma.
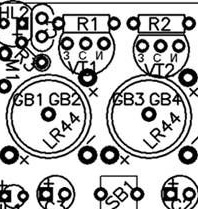

Što se tiče potrebnog elektronički elemenata, prikazani su na slici. Pisana pločica izrađena je od folijske ploče s folijom, dimenzije su joj samo 30X30 mm. Autor također preporučuje uporabu malih polarnih kondenzatora za montažu.
Proces izrade robota
Prvi korak. Shematski dijagram robota
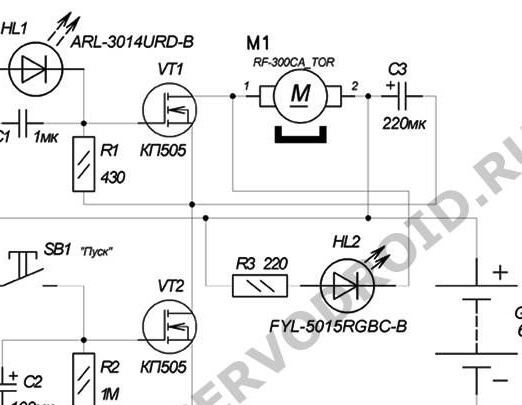
Krug robota može se vidjeti na slici. Nakon umetanja baterije, robot je u isključeno stanje, da biste ga uključili pritisnite tipku SB1. Odmah nakon toga kondenzator C2 trenutno se puni. Pozitivna ploča iz kondenzatora spojena je na vrata poljskog tranzistora VT2. S tim u vezi, kad se dosegne prag prebacivanja, otpor kanala za ispuštanje kanala ovog kanala trenutno opada i na odvodu se stvara negativan potencijalni naboj. Pa, što će se dogoditi dalje, detaljnije ćemo vidjeti u dijagramu.
Drugi korak Ugradite RGB LED
LED pod brojem 1 ugrađen je na sklopnu ploču. Na crtežu se ovaj položaj naziva HL2. Nakon ugradnje LED-a, njegovi zaključci moraju biti savijeni tako da se LED usmjeri u stranu. Tako će tijekom rada LED zasvijetliti ne gore, već u stranu, osvjetljavajući zidove. U kojem će smjeru svjetlost svijetliti označena je crnom strelicom.

Treći korak Montirajte nosače za postavljanje baterije
Za uspostavljanje kontakta između baterije i robota koriste se gurnuti igle.Jedan je gumb instaliran u sredini, u dijagramu je označen kao GB1, GB2, a drugi je postavljen u položaj GB3, GB4. Da biste sigurno fiksirali kontakte, gumbi su lemljeni velikom količinom lemljenja.


Baterije su ugrađene na metalni gumb ispod broja 3. Baterije su učvršćene učvršćivačem u obliku slova U, na kojem se nose izolatori iz cijevi. Gornji dio nosača mora biti lagano savijen lukom prema dolje, to će omogućiti da se baterije pritisnu na donji kontakt. Potrebne su izolacijske cijevi, tako da okomite stranice akumulatora ne dolaze u dodir s vodoravnim.
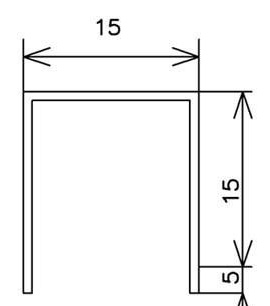
Da biste napravili učvršćivač u obliku slova U, trebate koristiti dvije kopče za papir. Potrebno ih je saviti u obliku slova U, kako je naznačeno na crtežu. Ovdje se mogu koristiti bilo koje cijevi, ovdje se koristi polivinilklorid. Njihova visina treba biti jednaka visini akumulatora.
Ugradite nosač lemljenjem, jer za to morate pokositi njegove krajeve. Za kalaj je potrebno koristiti neutralni fluid koji se ne ispire.
Četvrti korak Ugradite motor
Motor je instaliran na bočnoj strani ploče kroz koju gusjenice prolaze, smješten je s osovinom prema dolje. Za pričvršćivanje motora možete koristiti vruće ljepilo ili dvostranu traku. Ali prije nego čvrsto ugradite motor, morate ga spojiti i provjeriti čitav sustav na rad.

Peti korak Postavljanje i testiranje domaći
Nakon sastavljanja robota možete testirati i konfigurirati. Da biste to učinili, u robota morate instalirati baterije, one se postavljaju umjesto GB1, GB2 i GB3, GB4. U ovom slučaju, elektronika mora biti u isključenom stanju. Nakon ugradnje baterija, robot se može uključiti, to je učinjeno pomoću gumba SB1. Nakon pritiska motor bi trebao započeti s radom, LED HL1 će treptati, a zasvijetlit će i RGB LED.
Nakon nekog vremena, robot će se automatski isključiti, zaustavit će se i sve diode će se ugasiti. Zatim se uključuje na isti način kao i prvi put pritiskom na tipku.

Da biste prilagodili vrijeme robota, morate eksperimentirati s vrijednostima otpornika R2 i kondenzatora C2, oni su odgovorni za ovu funkciju. Ako trebate postaviti maksimalan rad robota, tada bi kapacitet kondenzatora trebao biti što veći. Na tako jednostavan način možete sastaviti tako zanimljivog robota.