
Ovaj robot upravlja bluetooth pametnim telefonom. Akcelerometar pametnog telefona mjeri kut telefona lijevo / desno, gore / dolje, koristi ove podatke za izračunavanje brzina usmjerenih motora, podaci se preko Bluetooth-a prenose u Težak
Što trebate za izgradnju robota.
Arduino uno, HC-06 Bluetooth modul, dva motora s 12 okretaja u minuti, 12 V, H-most L298N Dual H Bridge Controller
12 do 1.3 Baterija od olovne kiseline. Svaki motor troši 0,4 A, plus potrošnju logike vozača. Arduino žice, obične 9V baterije i priključak za spajanje baterije na Arduino. Električne žice za povezivanje pokretača elektromotora. USB kabel. Telefon s Androidom verzije 4 i novijim. 4 okretna 50 mm gumena naplatka od Screwfix ili Toolstation; Dva univerzalna glavčina za Lynxmotion HUB-02.










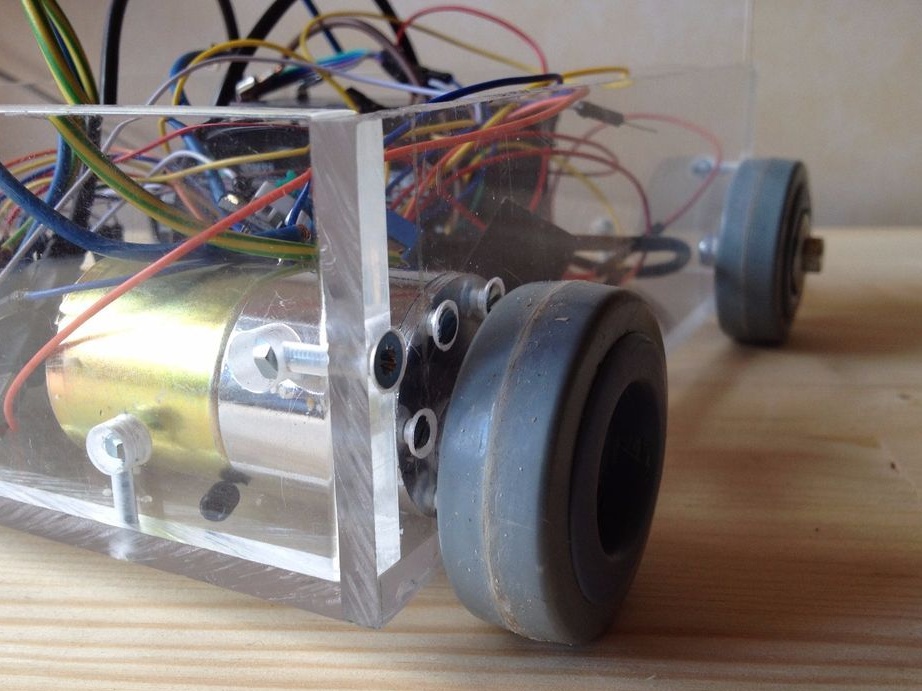
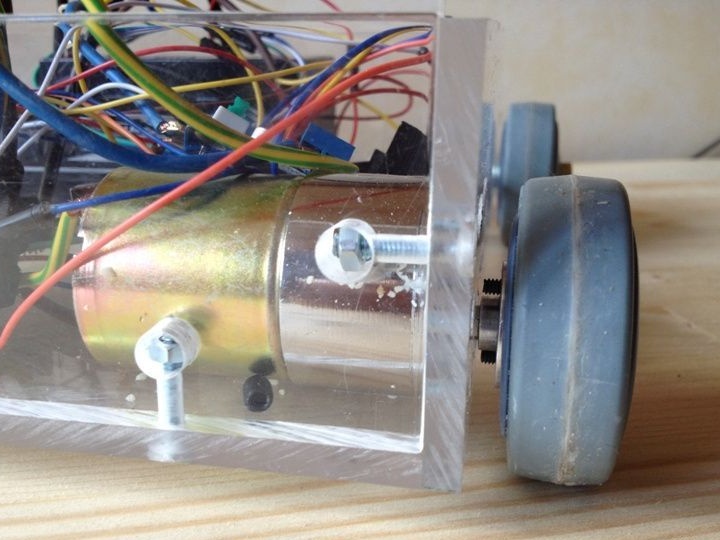
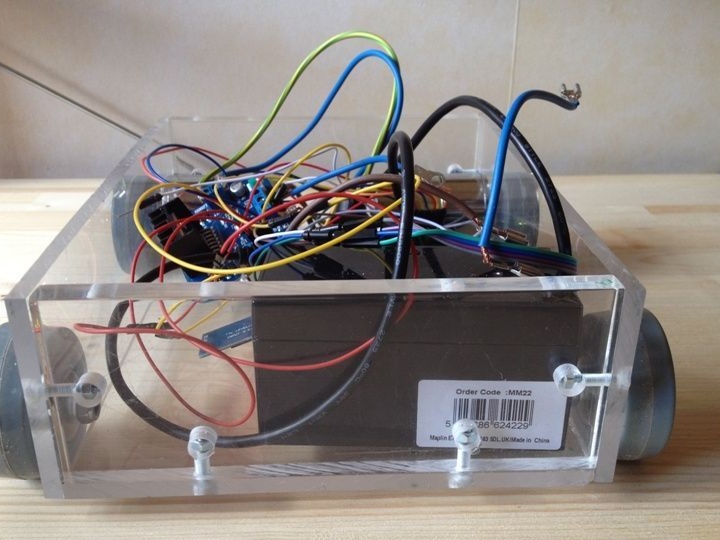
Futrola je sastavljena od plastike duljine 22 cm i širine 17 cm. Dva motora moraju biti spojena na osovinu i pričvršćena navojnim osovinom.
Prednji kotači
Guma se uklanja s valjka i u njima se izbuše dvije rupe u skladu s rupama na glavčinama. Glavčine su fiksirane na osovinama koje prolaze kroz kućište s navojnim klinovima. Nakon toga, valjci se učvršćuju na glavčinama, a na njih se stavlja guma.
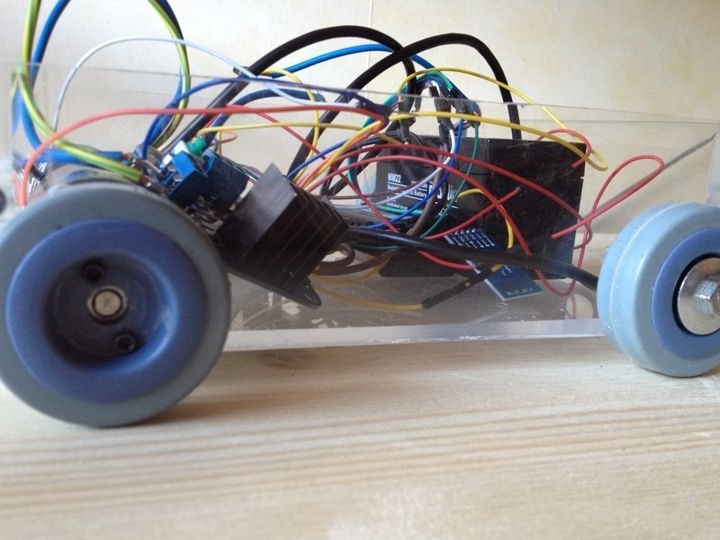
Stražnji kotači
Zadnji kotači jednostavno su odvrnuti sa šarke i pričvršćeni kroz rupe izbušene u kućištu.
Električne veze.
Bit će problema s učitavanjem programskog koda u Arduinu. To je zbog činjenice da su Bluetooth modul, njegovi RX \ TX kontakti spojeni na Arduino pinove 1 i 2, koji se također koriste za prijenos podataka putem USB-a. Potrebno je promijeniti kontakte 1 i 2 u 11 i 12 u povezanoj knjižnici, koji će se koristiti za prijenos podataka.
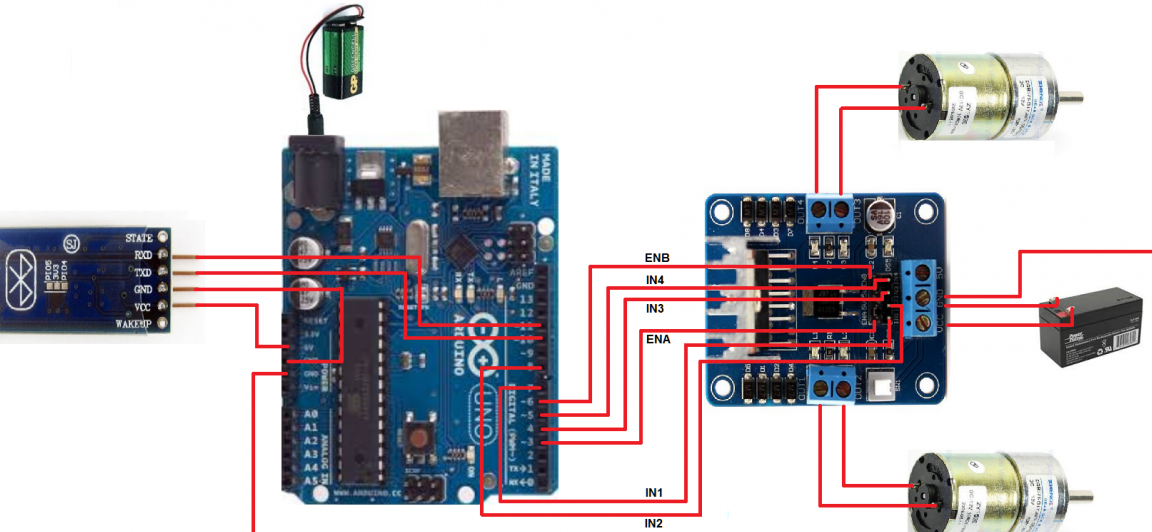
Vozaču motora ne treba zasebno napajanje za logiku. 12V je dovoljno za napajanje vozačke logike i samog motora. Minus akumulatora treba biti povezan i sa Arduino i s vozačem motora. ECA / 5V i ENB / 5V kontakti vozača motora mogu se preskočiti. Mora se ukloniti prije spajanja na Arduino. Ništa ne bi trebalo biti povezano s dva 5V pina.
Android kod.
Priložena datoteka mora biti raspakirana i uvezena u Android Studio, spakirati je u apk i instalirati na telefon.
Ključne datoteke:
Aktivnost uparenih uređaja:
deviceList.java
activity_device_list.xml
Aktivnost LED i kontrole kretanja:
ledControl.java
activity_led_control.xml
manifest:
AndroidManifest.xml
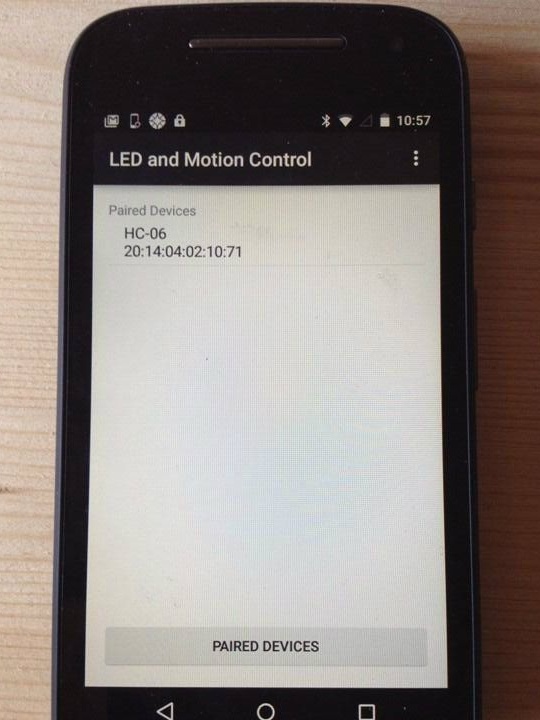
Aktivnost uparenih uređaja prikazuje dostupne Bluetooth uređaje. Čim su uređaji povezani, kontrola se prenosi na LED i aktivnost kontrole kretanja.
Gumbi za uključivanje / isključivanje šalju Arduino poruku „uključeno“ ili „isključeno“, uključivanjem ili isključivanjem ugrađene LED. Akcelerometar telefona, koji prenosi x / y vrijednosti iz senzora, svaki put kada se te vrijednosti promijene, kontrolira kretanje. Na temelju toga Arduino izračunava brzinu i smjer vrtnje motora u rasponu od 0 do 255. Te Arduino vrijednosti prenosi u obliku 'L-255:' ili 'R100' itd. Na temelju toga Arduino šalje naredbe za brzinu rotacije lijevog motora ENA-u, desne ENB-u i mijenja smjer rotacije mijenjajući polaritet u IN1, IN2 za lijevi, N3 i N4 za desne motore.