


Dio mog dizajna preuzeo sam iz uputstava za montažu Lego Technic 42049. Ostalo je moja improvizacija. Za upravljanje koristit ću Bluetooth modul spojen na android uređaj ili računalo.
Stoga nam trebaju:
- Lego Technic 42029
- Lego Technic 42033
- Arduino Pro Mini 5v AT Mega 328
- 2 pokretača motora L9110S
- 1 servo pogon SG-90
- Bluetooth modul HC-05 ili sličan
- USB-UART za arduino firmware
- Motor s mini prijenosnikom 50 o / min
- Mini motorni mjenjač 100 o / min
- Motorni mjenjač 6v 150 o / min
- 2 LED
- 2 otpornika 150 ohma
- Kondenzator 10v 1000uF
- 2 jednoredna češlja PLS-40
- Induktor 68mkGn
- 6 NI-Mn 1.2v 1000mA baterija
- Priključak tata-mama dva pina na žicu
- Homutik
- Žice različitih boja
- lemljenje
- Rosin
- lemljenje željeza
- Vijake 3x20, matice i podloške za njih
- Vijci 3x40
- Vijci 3x60
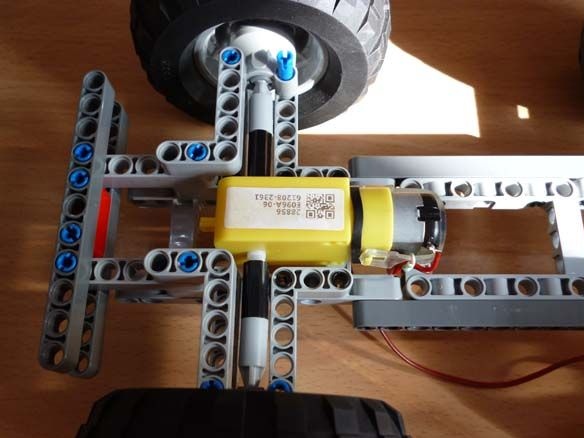
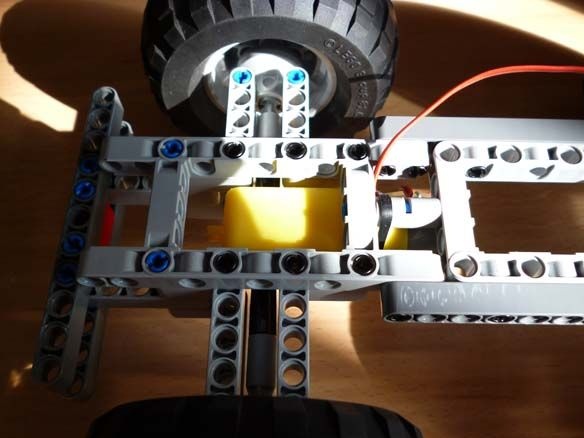
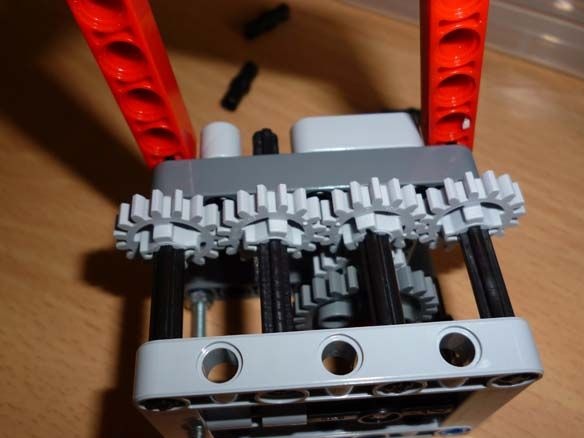
Korak 1 Sklop zadnje osovine
Za kretanje ćemo koristiti motor zupčanika sa 6-voltnim motorom pri brzini od 150 o / min. Osovina prijenosnika mora biti presječena s obje strane i staviti na dijelove lego. Stražnja osovina sastavljena je na sljedeći način:
A na stranu:
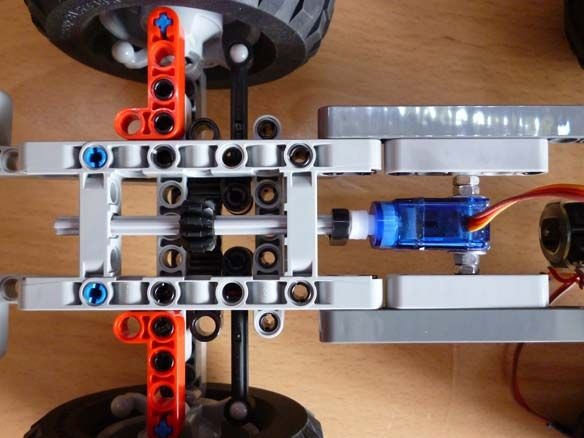
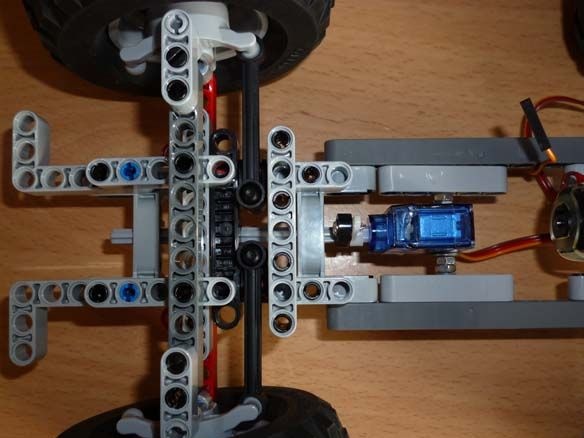
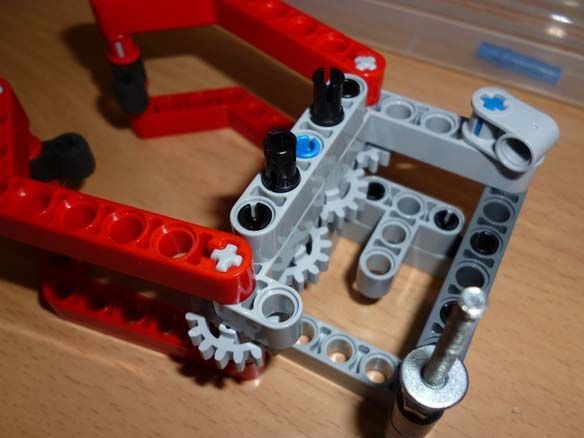
Korak 2 Sastavljanje prednje osovine
Za rotaciju kotača dobro je prilagođen servo SG-90. Da biste je fiksirali na našem modelu, potrebno je pažljivo izbušiti, kako se ne bi dotakli unutarnji dijelovi servo-kanala, prolazni otvor s promjerom od 3,2 mm ili ga jednostavno izrezati tiskanim nožem. A također odrežite izbočene dijelove ("krila" za pričvršćivanje). U napravljeni otvor otvorimo vijak i popravimo ga maticama. Na servo vratilo stavljamo polugu s vijčanim dijelom lego:

A na stranu:
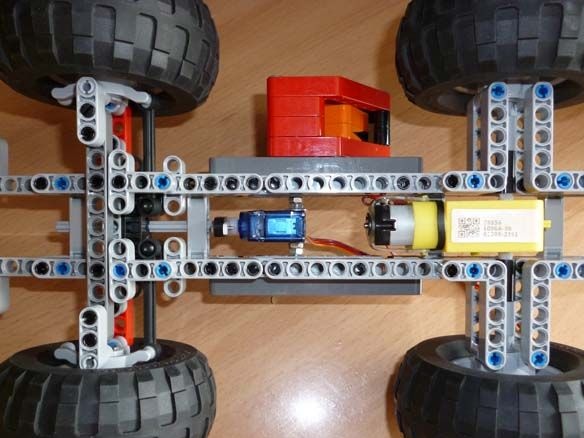
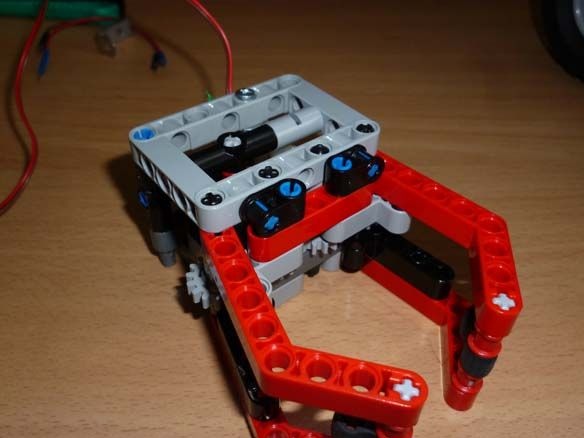
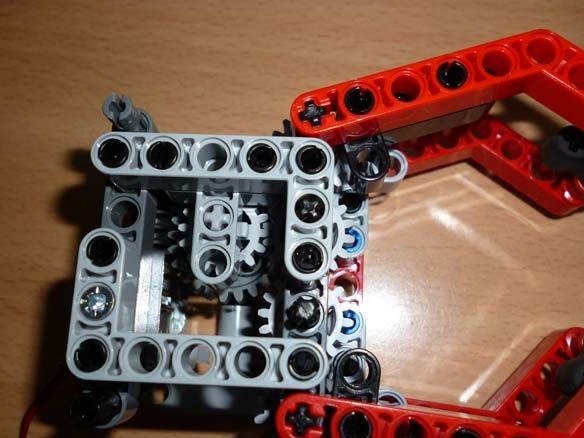
Korak 3 Sastavljanje baze i kabine
Oba mosta povezujemo kao što je prikazano na fotografiji:

Montiramo kabinu (potrebnu za ljepotu):
Kabinu smo postavili na osnovu:

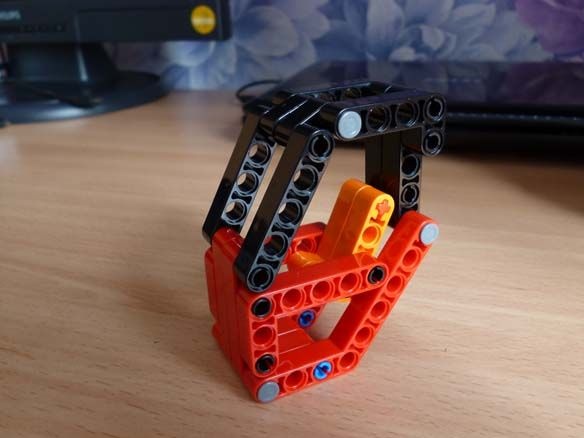
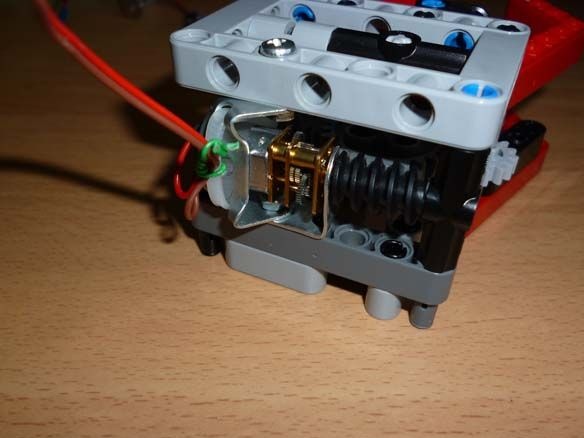
4. korak Stavljanje kape ili kandže
Pandža se pokreće mini motornim mjenjačem brzinom od 50 okr / min. Problem spajanja motora zupčanika s dijelovima dizajnera riješio sam na sljedeći način: Na osi motora zupčanika stavio sam spojnu rukavicu i umetnuo komadić šibice za pričvršćivanje. Za ugradnju je motor zupčanika koristio metalnu plastiku željeznog dizajnera i stezaljku. Pokazalo se sljedeće:

Dalje, sakupimo samu kandžu s fotografije:

Popravljamo ga na bazu:
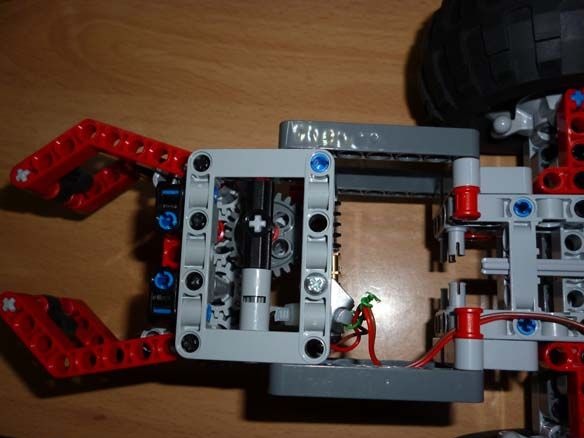

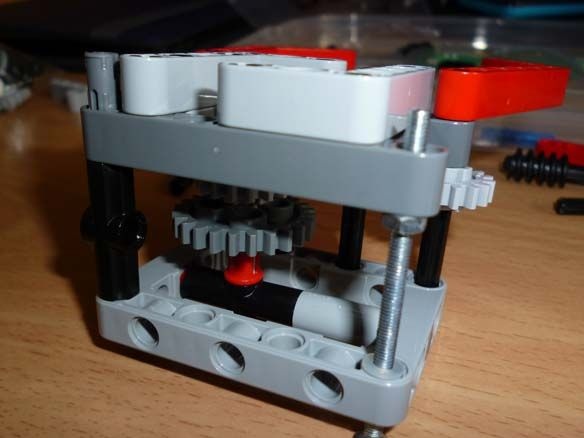
Mini motorni mjenjač brzine od 100 o / min pogodan je za podizanje kandže:


Korak 5 Električar
Za kontrolu koristit ćemo Arduino Pro Mini i Bluetooth modul. Za povezivanje motora potrebni su pogonitelji.
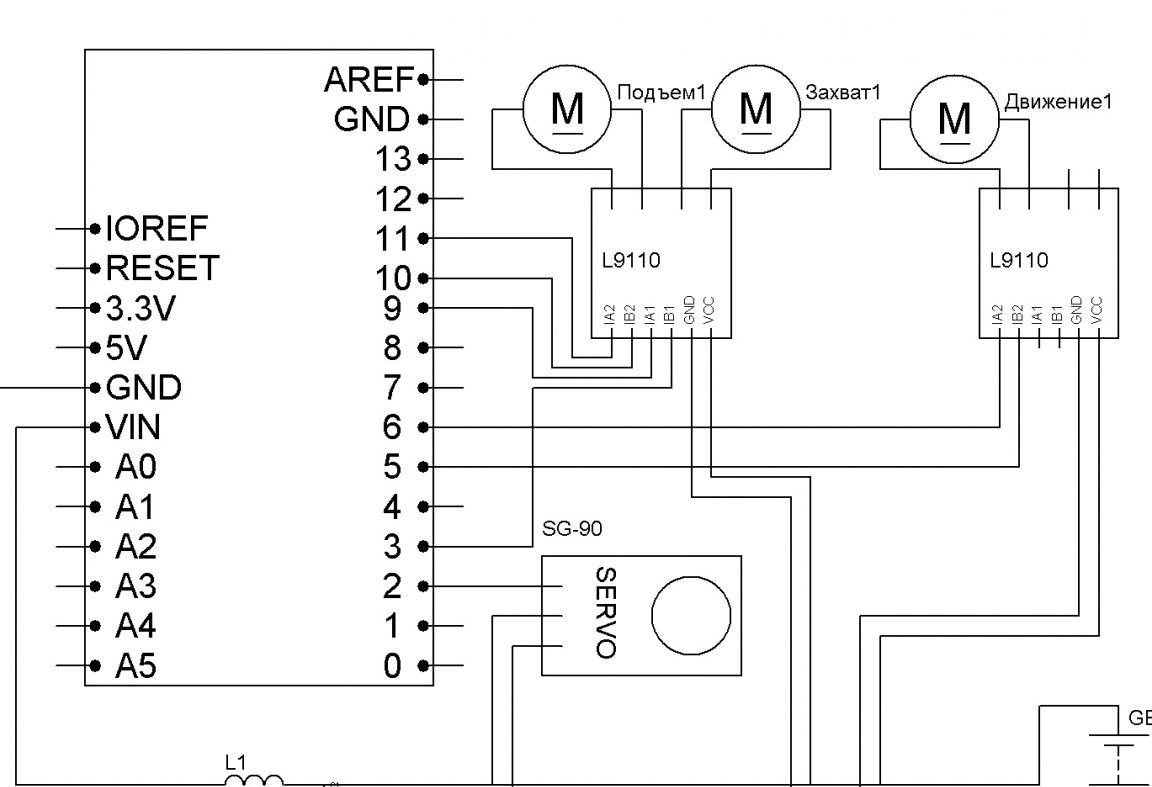
Spajanje svih komponenata sa Dupont žicama majke-majke.Snaga - 6 NI-Mn 1,2v 1000mA baterija serijski spojenih. Kondenzator bilo koje male snage, induktor također ćete naći, morate stabilizirati snagu mikrokontrolera. Anode dviju LED dioda spojene su na 4-polni arduino, a katode na GND. Otpori su odabrani za LED koji se koriste. Radi praktičnosti, namotajte baterije trakom.

Sve to ljepimo na dvostranu traku na osnovu:

Korak 6 Postavljanje Bluetooth-a
Najpristupačniji Bluetooth moduli danas su HC-05 i HC-06. Njih ima u izobilju u kineskim internetskim trgovinama. Razlike između njih su u tome što prvi mogu raditi i u načinu master (slave) i u robovi mode (master). Drugi je čisto robovski uređaj. Drugim riječima, HC-06 ne može otkriti uparen uređaj i uspostaviti vezu s njim, može samo poslušati master.
Kratke karakteristike modula:
- Bluetooth čip - BC417143 proizvođača
- komunikacijski protokol - Bluetooth Specifikacija v2.0 + EDR;
- polumjer djelovanja - do 10 metara (razina snage 2);
- Kompatibilan sa svim Bluetooth adapterima koji podržavaju SPP;
- količina flash-memorije (za pohranu firmvera i postavki) - 8 Mbit;
- frekvencija radio signala - 2,40 .. 2,48 GHz;
- sučelje glavnog računala - USB 1.1 / 2.0 ili UART;
- potrošnja energije - struja tijekom komunikacije je 30-40 mA. Prosječna vrijednost struje je oko 25 mA. Nakon uspostavljanja veze, trenutna potrošnja je 8 mA.
Obično se moduli prodaju kao dvije ploče spojene zajedno. Manji je tvornički modul, koji se široko koristi u raznim elektronički uređaji. Veliki - posebna ploča za "uradi sam". Izgleda kao manja ploča s čipom BC417:

I tako sami DIY moduli HC-05 i HC-06:
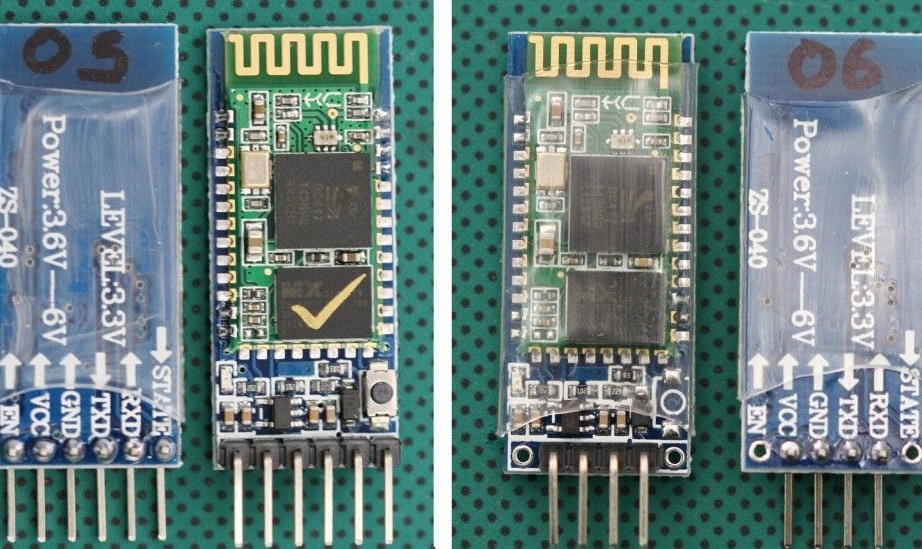
U principu možete koristiti bilo koji modul koji vam se sviđa. Modul bez ploče košta manje, ali tada ćete se morati pobrinuti za 3.3 V napajanje za modul i mučiti se lemljenjem žica za modul. Odabrao sam optimalni, po mom mišljenju, omjer cijene i funkcionalnosti HC-06.
Povezujemo na sljedeći način:
Arduino Pro Mini - Bluetooth
D7 - RX
D8 - TX
5V - VCC
GND –GND
Za ispravan rad modul mora biti konfiguriran. Konfigurirat ćemo AT naredbe koje su unesene u prozor terminala. Dajem primjer postavljanja HC-05 modula. Ako imate drugu postavku, mogu biti i različite. Da bi naš modul primio naredbe, prvo bljesnemo Arduino sa sljedećim firmware-om:
U ovom slučaju Arduino djeluje kao most između računala i modula. U upravljačkom programu koristim biblioteku SoftwareSerial. Pri velikim brzinama djeluje nestabilno. Ako želite veliku brzinu, možete spojiti modul izravno na Arduino RX i TX kontakte i ponovno napisati firmware. Ali u mom slučaju ćemo raditi s modulom brzinom od 9600. Dakle, nakon firmvera, otvorite terminal i unesite:
"AT" (bez navodnika) trebao bi stići odgovor "u redu" (znači da je sve ispravno povezano i modul radi)
„AT + BAUD96000“ (bez navodnika) trebao bi doći odgovor „OK9600“.
Ako imate pravi odgovor, prijeđite na sljedeći korak.
7. korak Ugradbeni softver
Za pisanje firmwarea i samog firmwarea koristim Arduino IDE. Trenutna verzija za danas je 1.8. Zapravo firmware:
Korak 8 Podesite telefon.
Na Android telefonu morate instalirati program za kontrolu robota putem Bluetooth-a. Ima ih puno. U Google play možete upisati "Bluetooth Arduino" i odabrati po svom ukusu. Svidio mi se BT kontroler. Preuzmite i instalirajte na svoj Android telefon ili tablet. Zatim, putem Androidovih postavki, morate uspostaviti vezu s našim modulom. Lozinka za vezu je "1234" ili "0000". Zatim konfigurirajte program za odgovarajuće naredbe. Popis je u nastavku.
Korak 9 Postavljanje računala (ako je potrebno)
Ako je potrebno ili samo pogodnost za kontrolu, možete koristiti računalo ili prijenosno računalo. Da biste to učinili, računalo mora imati Bluetooth. Uspostavljamo komunikaciju s našim modulom preko kontrola na računalu. Dalje, potreban nam je terminal za slanje naredbi. Bilo koji zgodan za vas. Nakon snimanja upravljačkog softvera, kontrola se vrši pomoću sljedećih tipki (naredbi):
W - naprijed
S - leđa
A - lijevo
D - u pravu
F - stani
G - volan
K - prednja svjetla
L - isključeno prednje svjetlo
R - podići se
E - nizbrdo
Q - stop lift
T - hvatanje
Y - Otpustite
H - Stop kandži
Stalno unošenje naredbi je nezgodno, pa preporučujem korištenje programa za slanje naredbi. Koristim Z-kontroler.U programu odaberite ulaz (com port preko kojeg se uspostavlja veza) i konfigurirajte tipke za naredbe. Postavite neaktivno i intuitivno.
