


Dio mog dizajna preuzeo sam iz upute za montažu Lego Technic 42049 i Lego Technic 42041. Ostalo je moja improvizacija. Za kontrolu koristit ću Bluetooth modul povezan s android uređajem ili računalom. Stoga nam trebaju:
- Lego Technic 42029
- Lego Technic 42033
- Arduino Pro Mini 5v AT Mega 328
- L9110S vozač motora
- 1 servo pogon SG-90
- Bluetooth modul HC-05 ili sličan
- USB-UART za arduino firmware
- Motorni mjenjač 6v 1: 150 100 o / min
- 2 LED
- 2 otpornika 150 ohma
- Kondenzator 10v 1000uF
- 2 jednoredna češlja PLS-40
- Induktor 68mkGn
- 6 NI-Mn 1.2v 1000mA baterija
- Priključak tata-mama dva pina na žicu
- Homutik
- Žice različitih boja
- lemljenje
- Rosin
- lemljenje željeza
- Vijake 3x20, matice i podloške za njih
- Vijci 3x40
- Vijci 3x60
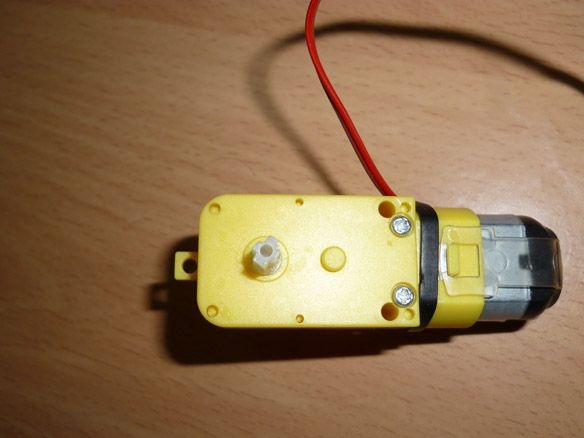
Korak 1 Sklop zadnje osovine
Pomicanje prema naprijed-nazad izvest će motor zupčanika sa 6V motorom, prijenosnim omjerom 1: 150 i praznim hodom od 100 okr / min. Možete isprobati još jedan prijenosni omjer, ali, po mom mišljenju, ovo je optimalno. Osa mjenjača s obje strane mora biti urezana u oblik križa i staviti na lego detalje:
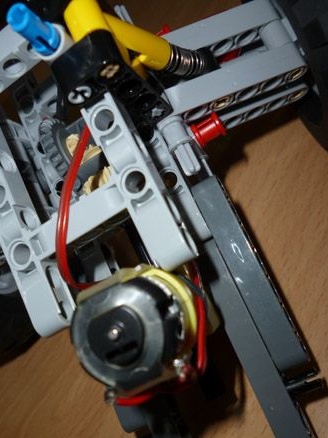
Zatim prikupljamo osnovu stražnje osovine prema uputama Lego 42029, dio 1, počevši od 3 stranice do 8. I dodajte nekoliko pojedinosti kako biste mogli instalirati motor i mjenjač.
Pogledaj internetsku datoteku:
Pogledaj internetsku datoteku:



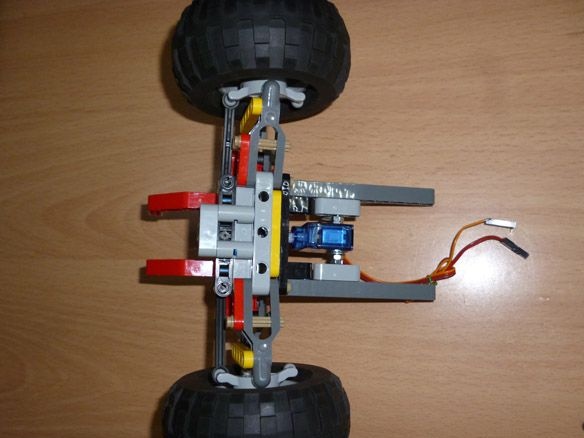
Korak 2 Sastavljanje prednje osovine
Sastavimo prednji dio ovjesa prema uputama Lego 42029, dio 1, od stranice 21 do 23. Trapez iz drugog dijela Lega preuzimamo sa stranice 6 do 11. Servo SG-90 je vrlo pogodan za okretanje kotača. Da biste je fiksirali na našem modelu, potrebno je pažljivo izbušiti, kako se ne bi dotakli unutarnji dijelovi servo-kanala, prolazni otvor s promjerom od 3,2 mm ili ga jednostavno izrezati tiskanim nožem. A također odrežite izbočene dijelove ("krila" za pričvršćivanje). U napravljeni otvor otvorimo vijak i popravimo ga maticama. Na servo vratilo stavljamo polugu s vijčanim dijelom lego:





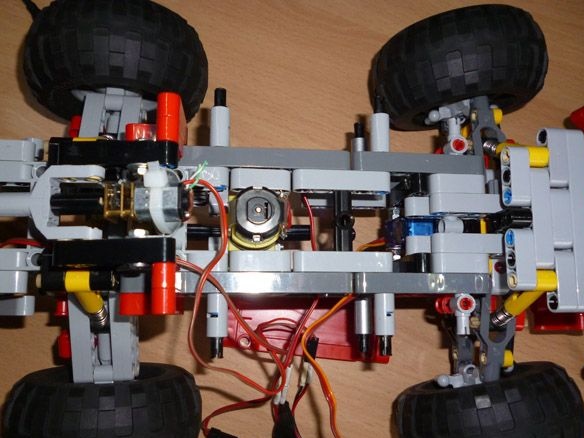
Korak 3 Sastavljanje baze i kabine
Oba mosta povezujemo kao što je prikazano na fotografiji:
Kabinu sastavljamo prema uputama Lego 42041. Polazeći od stranica 39 do 47 prvog dijela. Nadalje od stranice 5 do 28 drugog dijela. A također i branik na stranicama 38 do 43 drugog dijela upute.
Pogledaj internetsku datoteku:
Pogledaj internetsku datoteku:


Pogledaj internetsku datoteku:
Pogledaj internetsku datoteku:
Korak 4 Elektrika
Za kontrolu koristit ćemo Arduino Pro Mini i Bluetooth modul. Pro Mini se može zamijeniti s bilo kojom drugom Arduino pločom. Odabrao sam Pro Mini, tako da je najmanji. Za povezivanje motora potreban je pokretački pogon.
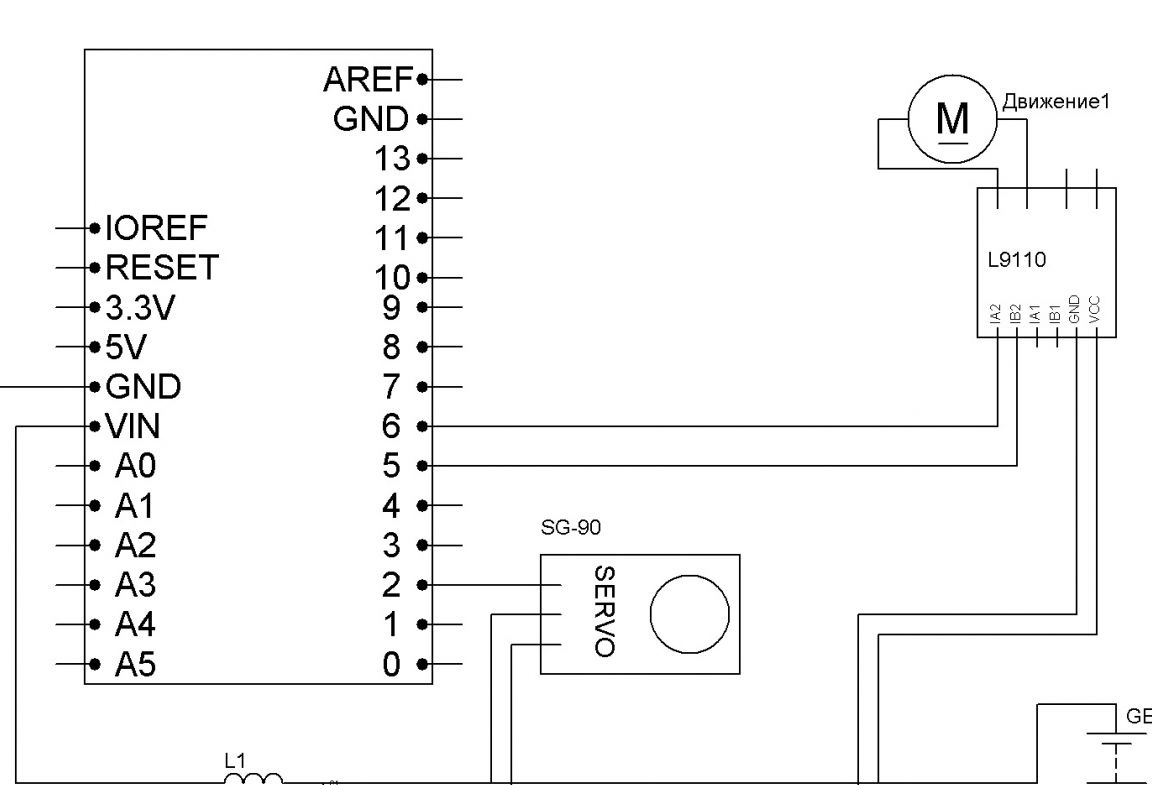
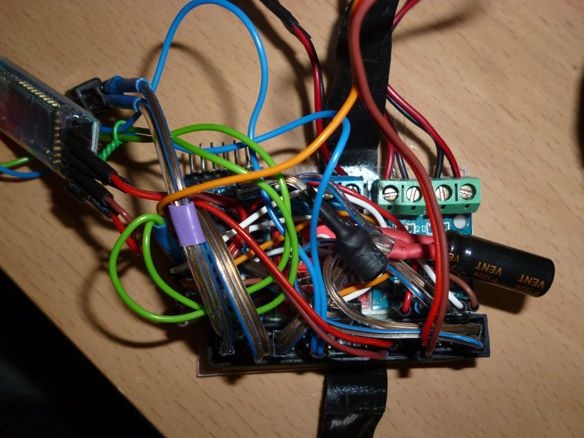
Povezivanje svih komponenata s Dupontovim žicama od majke do majke. Snaga - 6 NI-Mn 1,2v 1000mA baterija serijski spojenih. Kondenzator bilo koje male snage, induktor također ćete naći, morate stabilizirati snagu mikrokontrolera. Anode dviju LED dioda spojene su na 4-polni arduino, a katode na GND. Otpori su odabrani za LED koji se koriste. Radi praktičnosti, namotajte baterije trakom.

Sve to ljepimo na dvostranu traku na osnovu:
Postavimo našeg električara između točkova i zatvorimo:
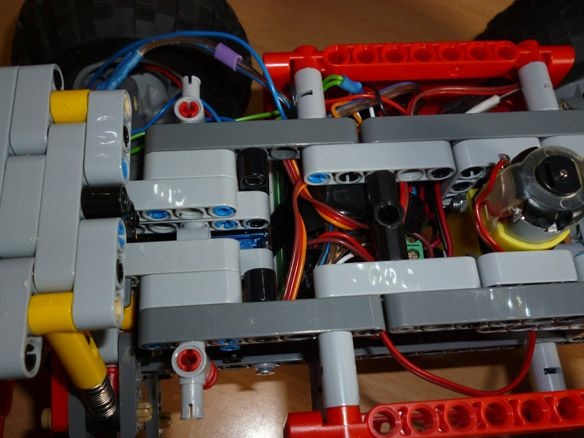
Dodajte nekoliko poteza:


Korak 5 Postavljanje Bluetooth
Najpristupačniji Bluetooth moduli danas su HC-05 i HC-06. Njih ima u izobilju u kineskim internetskim trgovinama. Razlike između njih su u tome što prvi mogu raditi i u načinu master (slave) i u robovi mode (master). Drugi je čisto robovski uređaj. Drugim riječima, HC-06 ne može otkriti uparen uređaj i uspostaviti vezu s njim, može samo poslušati master.
Kratke karakteristike modula:
- Bluetooth čip - BC417143 proizvođača
- komunikacijski protokol - Bluetooth Specifikacija v2.0 + EDR;
- polumjer djelovanja - do 10 metara (razina snage 2);
- Kompatibilan sa svim Bluetooth adapterima koji podržavaju SPP;
- količina flash-memorije (za pohranu firmvera i postavki) - 8 Mbit;
- frekvencija radio signala - 2,40 .. 2,48 GHz;
- sučelje glavnog računala - USB 1.1 / 2.0 ili UART;
- potrošnja energije - struja tijekom komunikacije je 30-40 mA. Prosječna vrijednost struje je oko 25 mA. Nakon uspostavljanja komunikacije, trenutna potrošnja je 8 mA.
Obično se moduli prodaju kao dvije ploče spojene zajedno. Manji je tvornički modul, koji se široko koristi u raznim elektronički uređaji. Veliki - posebna ploča za "uradi sam".
Ovako izgledaju HC-05 i HC-06 DIY moduli:
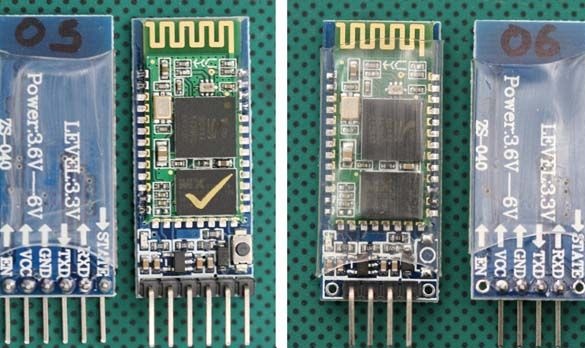
U principu možete koristiti bilo koji modul koji vam se sviđa. Modul bez ploče košta manje, ali tada ćete se morati pobrinuti za 3.3 V napajanje za modul i mučiti se lemljenjem žica za modul. Odabrao sam optimalni, po mom mišljenju, omjer cijene i funkcionalnosti HC-06.
Povezujemo na sljedeći način:
Arduino Pro Mini - Bluetooth
D7 - RX
D8 - TX
5V - VCC
GND –GND
Za ispravan rad modul mora biti konfiguriran. Konfigurirat ćemo AT naredbe koje su unesene u prozor terminala. Dajem primjer postavljanja HC-05 modula. Ako imate drugu postavku, mogu biti i različite. Da bi naš modul primio naredbe, prvo bljesnemo Arduino sa sljedećim firmware-om:
U ovom slučaju Arduino djeluje kao most između računala i modula. U upravljačkom programu koristim biblioteku SoftwareSerial. Pri velikim brzinama djeluje nestabilno. Ako želite veliku brzinu, možete spojiti modul izravno na Arduino RX i TX kontakte i ponovno napisati firmware. Ali u mom slučaju ćemo raditi s modulom brzinom od 9600. Dakle, nakon firmvera, otvorite terminal i unesite:
"AT" (bez navodnika) trebao bi stići odgovor "u redu" (znači da je sve ispravno povezano i modul radi)
„AT + BAUD96000“ (bez navodnika) trebao bi doći odgovor „OK9600“.
Ako imate pravi odgovor, prijeđite na sljedeći korak.
7. korak Ugradbeni softver
Za pisanje firmwarea i samog firmwarea koristim Arduino IDE. Trenutna verzija za danas je 1.8. Zapravo firmware:
Korak 8 Podesite telefon.
Na Android telefonu morate instalirati program za kontrolu robota putem Bluetooth-a. Ima ih puno. U Google play možete upisati "Bluetooth Arduino" i odabrati po svom ukusu. Svidio mi se BT kontroler. Preuzmite i instalirajte na svoj Android telefon ili tablet. Zatim, putem Androidovih postavki, morate uspostaviti vezu s našim modulom. Lozinka za vezu je "1234" ili "0000". Zatim konfigurirajte program za odgovarajuće naredbe. Popis je u nastavku.
Korak 9 Postavljanje računala (ako je potrebno)
Ako je potrebno ili samo pogodnost za kontrolu, možete koristiti računalo ili prijenosno računalo. Da biste to učinili, računalo mora imati Bluetooth. Uspostavljamo komunikaciju s našim modulom preko kontrola na računalu. Dalje, potreban nam je terminal za slanje naredbi. Bilo koji zgodan za vas.Nakon snimanja upravljačkog softvera, kontrola se vrši pomoću sljedećih tipki (naredbi):
W - naprijed
S - leđa
A - lijevo
D - u pravu
F - stani
G - volan
K - prednja svjetla
L - isključeno prednje svjetlo
Stalno unošenje naredbi je nezgodno, pa preporučujem korištenje programa za slanje naredbi. Koristim Z-kontroler. U programu odaberite ulaz (com port preko kojeg se uspostavlja veza) i konfigurirajte tipke za naredbe. Postavite praznim i intuitivnim.
