
Materijali i alati:
- mikrokontroler Arduino (u ovome domaći proizvod primjenjuje Arduino Uno Rev 3);
- Dva servo-uređaja iz Parallaxa;
- upravljačka palica (također od Parallaxa);
- pločica) mala);
- priključci za spajanje;
- Uređaj za praćenje kretanja servomotora (koristi se pokvarena web kamera i lego kocke).
Postupak montaže kod kuće:
Prvi korak. Povezujemo servomotore
Postupak domaće montaže započinje spajanjem servomotora. Kako bi se sastavio preliminarni izgled, koristi se sklopna ploča. Tada će biti moguće napraviti zaseban štit. Na slici možete vidjeti kako je točno sve povezano.
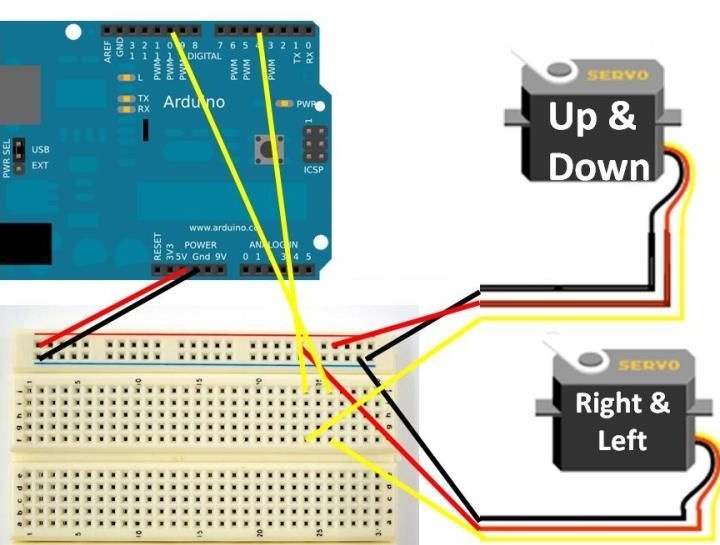
Crveni kabel je snaga, priključuje se na 5V pin na Arduino regulatoru.
Crna žica je minus (tlo), povezuje se s Arduino izlazom zvanim GND.
Žuti kabel s desnog i lijevog servomotora mora biti povezan na iglu 11. Na nekim modelima može biti bijeli.
Sličan žuti gornji i gornji kabel mora biti povezan na pin 4. Također može biti bijele boje na nekim modelima motora.
Važno je zapamtiti da signalni priključci koji se koriste za upravljanje motorom dolaze iz PWM izlaza.
Drugi korak Spojite upravljačku ručicu
Kako je upravljačka palica povezana, možete vidjeti na slici. U početku se shema može činiti prilično kompliciranom, ali u stvari ovdje nema ništa komplicirano. Kao i kod motora, i ovdje se koristi ploča za ožičenje.
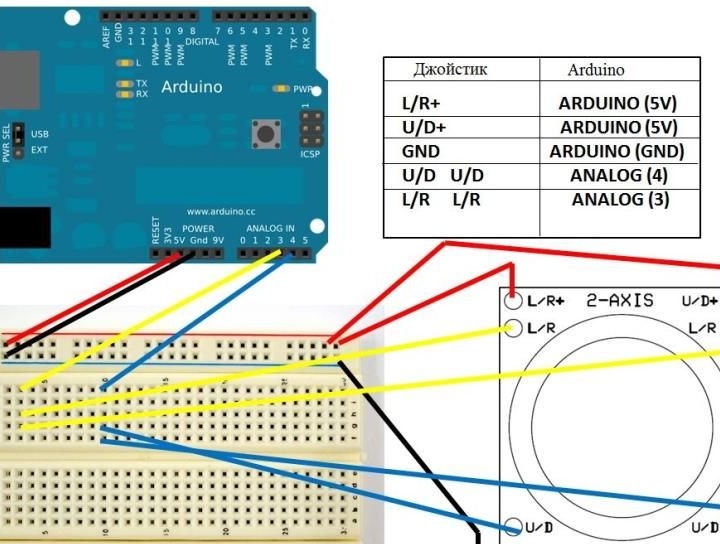
1. Na modulu upravljačke palice možete pronaći izlaze U / R + i L / R +. Kroz ove izlaze priključena je snaga. U skladu s tim, trebate primijeniti + 5V napona s odgovarajućeg kontakta na Arduino.
2. Postoje i dva priključka ispod upravljačke tipke pod nazivom L / R i dva U / D priključka. Potrebno ih je spojiti na analogne izlaze A3 i A4.
3. Pa u zaključku, zemlja na upravljačkoj ručici mora biti povezana sa zemljom na Arduinu.
Nakon sklapanja, veza se mora dvaput provjeriti. Problemi u povezivanju nastaju u većini slučajeva. To se posebno odnosi na uporabu pločice i na njoj postoji mnogo priključaka.
Treći korakSkica za Arduino
Kod je vrlo jednostavan i sadrži detaljne komentare. Gore navedeni kôd samo treba kopirati u Arduino IDE. Jednom kada se kôd učita, motori se ne smiju kretati. Kretanje bi se trebali započeti tek kada pritisnete gumb na upravljačkoj ručici.
Problemi koji se mogu pojaviti i kako ih riješiti
1. Ako se motori ne uključe, dvaput provjerite vezu. PWM izlazi koriste se za povezivanje motora, a analogni izlazi za povezivanje džojstika.
2. Dešava se da odmah nakon učitavanja koda motori počnu vibrirati. To se događa ako pogrešno povežete igle U / D + L / R +. Povezivanje treba pažljivo provjeriti. Kako se ploča ne bi spalila tijekom testa, mora se odvojiti od računala.
3. Ako je sve ponovo provjereno, ali motori i dalje ne žele raditi, možete pokušati ponovo spojiti upravljačku ručicu. Mora se izvaditi sa sklopne ploče, a zatim vratiti s nekim naporom. Konektori na džojstiku trebali bi dobro ući u izgled.
Ako se sve ispostavilo, sada možete započeti s izradom bilo kojeg domaćeg predmeta s kontrolom putem upravljačke ručice. Na primjer, možete napraviti robota kojim se može upravljati upravljačkom palicom i još mnogo toga.